网站建设延期报告网站优化和网站推广
https://download.csdn.net/download/qq_45685327/87718396
在前面小车底盘基础之上,添加摄像头和雷达传感器。
0.底盘实现
deamo02_base.xacro
<!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><xacro:property name="PI" value="3.141"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --><xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --><xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>
1.摄像头和雷达 Xacro 文件实现
摄像头 xacro 文件:
deamo03_camera.xacro
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot>
雷达 xacro 文件:
deamo04_laser.xacro
<!--小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length" value="0.15" /> <!-- 支架长度 --><xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 --><xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 --><xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 --><xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><!-- 雷达属性 --><xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 --><xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 --><xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 --><xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 --><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint>
</robot>
2.组合底盘摄像头与雷达的 xacro 文件
deamo05_xacrocar.xacro
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="xacrocar" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="deamo02_base.xacro" /><xacro:include filename="deamo03_camera.xacro" /><xacro:include filename="deamo04_laser.xacro" />
</robot>
3.launch 文件
demo06_xacrocar.launch
<launch><param name="robot_description" textfile="$(find urdf01_rviz)/urdf/xacro/deamo05_xacrocar.urdf" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" /> <!-- 添加关节状态发布节点 --><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><!-- 添加机器人状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><!-- 可选:用于控制关节运动的节点 --><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>4.生成的urdf文件
deamo05_xacrocar.urdf
<?xml version="1.0" encoding="utf-8"?>
<!-- =================================================================================== -->
<!-- | This document was autogenerated by xacro from deamo05_xacrocar.xacro | -->
<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | -->
<!-- =================================================================================== --><robot name="xacrocar"><material name="black"><color rgba="0.0 0.0 0.0 1.0"/></material><link name="base_footprint"><visual><geometry><sphere radius="0.001"/></geometry></visual></link><link name="base_link"><visual><geometry><cylinder length="0.08" radius="0.1"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="yellow"><color rgba="0.5 0.3 0.0 0.5"/></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0 0 0.055"/></joint><link name="left_wheel"><visual><geometry><cylinder length="0.015" radius="0.0325"/></geometry><origin rpy="1.5705 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="left_wheel2base_link" type="continuous"><parent link="base_link"/><child link="left_wheel"/><origin xyz="0 0.1 -0.0225"/><axis xyz="0 1 0"/></joint><link name="right_wheel"><visual><geometry><cylinder length="0.015" radius="0.0325"/></geometry><origin rpy="1.5705 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="right_wheel2base_link" type="continuous"><parent link="base_link"/><child link="right_wheel"/><origin xyz="0 -0.1 -0.0225"/><axis xyz="0 1 0"/></joint><link name="front_wheel"><visual><geometry><sphere radius="0.0075"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="black"/></visual></link><joint name="front_wheel2base_link" type="continuous"><parent link="base_link"/><child link="front_wheel"/><origin xyz="0.0925 0 -0.0475"/><axis xyz="1 1 1"/></joint><link name="back_wheel"><visual><geometry><sphere radius="0.0075"/></geometry><origin rpy="0 0 0" xyz="0 0 0"/><material name="black"/></visual></link><joint name="back_wheel2base_link" type="continuous"><parent link="base_link"/><child link="back_wheel"/><origin xyz="-0.0925 0 -0.0475"/><axis xyz="1 1 1"/></joint><link name="camera"><visual><geometry><box size="0.01 0.025 0.025"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link"/><child link="camera"/><origin xyz="0.08 0.0 0.0525"/></joint><link name="support"><visual><geometry><cylinder length="0.15" radius="0.01"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="red"><color rgba="0.8 0.2 0.0 0.8"/></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link"/><child link="support"/><origin xyz="0.0 0.0 0.115"/></joint><link name="laser"><visual><geometry><cylinder length="0.05" radius="0.03"/></geometry><origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="laser2support" type="fixed"><parent link="support"/><child link="laser"/><origin xyz="0.0 0.0 0.1"/></joint>
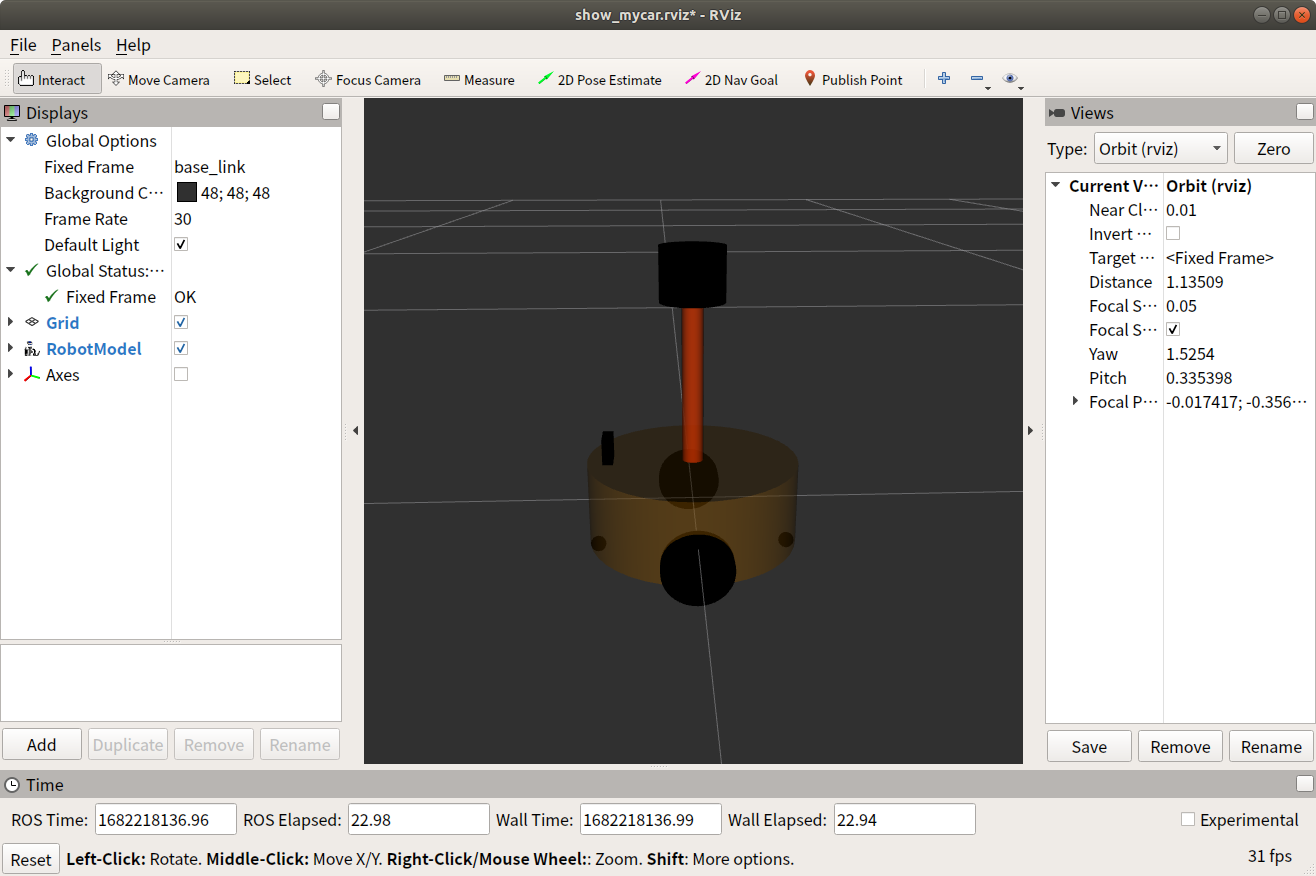
</robot>5.运行launch文件,查看效果
roslaunch urdf01_rviz demo06_xacrocar.launch