java做的网站 jsp百度的搜索引擎优化
文章目录
- 1.本方向内学习内容:
- 1.1.自定义msg:
- 1.1.1.定义msg文件:
- 1.1.2.编辑配置文件:
- 1.2.自定义srv:
- 1.2.1.定义srv文件:
- 1.2.2.编辑配置文件:
- 1.3.服务通信案例实现:
- 1.3.1.服务端实现:
- 重点语法、接口等的复现与记忆以及一些注意事项:
- 1.3.1.客户端实现:
- 重点语法、接口等的复现与记忆以及一些注意事项:
- 1.4.参数服务器:
- 1.5.URDF集成Rviz基本流程:
- 1.5.1.新建功能包,导入依赖:
- 1.5.2.编写urdf文件:
- 1.5.3.在launch文件集成URDF与Rviz:
- 1.5.4.在Rviz中显示机器人模型:
- 1.6.再识URDF标签:
- 1.6.1.link:
- visual(描述外观):
- geometry(设置连杆形状):
- origin(设置偏移量与倾斜角度):
- material(设置颜色):
- 碰撞参数等:
- 1.6.2.joint:
- parent (必须):
- child link:
- origin:
- axis:(需要转动的关节需要设置这个参数)
- 1.6.3. 完成小车仿真并加载到launch文件中:
- 1.6.4.base_footprint优化urdf:
1.本方向内学习内容:
1.1.自定义msg:
1.1.1.定义msg文件:
功能包下新建msg目录,添加文件 Person.msg。
string name
uint16 age
float64 height
1.1.2.编辑配置文件:
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
CMakeLists.txt编辑msg相关配置
1.
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs #std_msgs必须有message_generation #添加编译时依赖,加入这个
)
#配置msg源文件
add_message_files(FILESPerson.msg #添加创建的msg源文件)
#生成消息时依赖于std_msgs
generate_messages(DEPENDENCIESstd_msgs#添加std_msgs依赖)
去掉该依赖的注释。
4.
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_pub_subCATKIN_DEPENDS roscpp rospy std_msgs message_runtime#加上message_runtime
# DEPENDS system_lib
)
只放开CATKIN_DEPENDS一句,并加上message_runtime即可。
1.2.自定义srv:
srv=请求+相应
1.2.1.定义srv文件:
功能包下新建srv目录,添加xxx.srv文件:
int32 num1
int32 num2
---
int32 sum
注意:一定要按照格式来创建,三个-分割线不能少。上面是请求,下面是应答,注意顺序。
1.2.2.编辑配置文件:
与msg编辑配置文件相同。
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
CMakeLists.txt编辑msg相关配置
1.
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs #std_msgs必须有message_generation #添加编译时依赖,加入这个
)
#配置msg源文件
add_message_files(FILESAddints.srv #添加创建的srv源文件)
#生成消息时依赖于std_msgs
generate_messages(DEPENDENCIESstd_msgs#添加std_msgs依赖)
去掉该依赖的注释。
4.
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_pub_subCATKIN_DEPENDS roscpp rospy std_msgs message_runtime#加上message_runtime
# DEPENDS system_lib
)
只放开CATKIN_DEPENDS一句,并加上message_runtime即可。
1.3.服务通信案例实现:
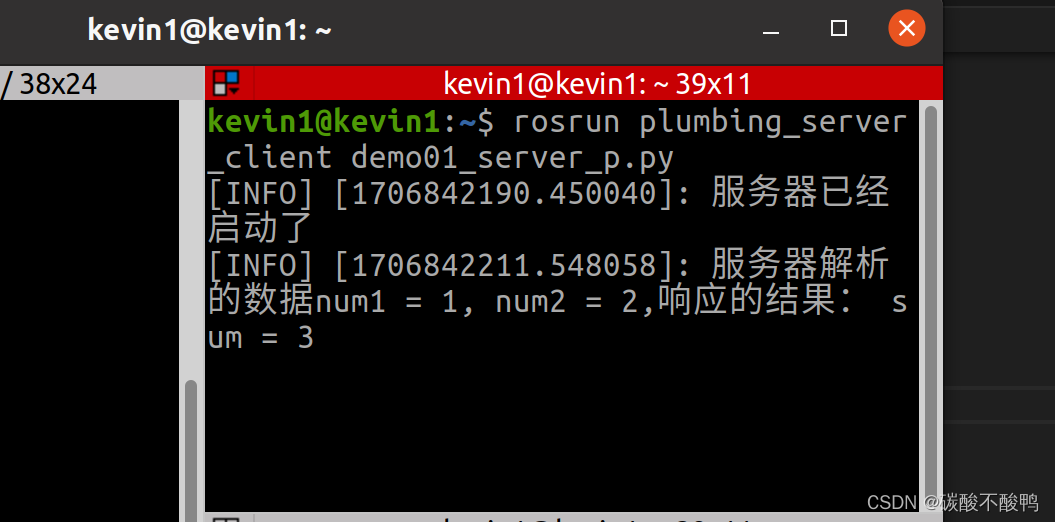
1.3.1.服务端实现:
#! usr/bin/env python import rospy
from plumbing_server_client.srv import Addints,AddintsResponse,AddintsRequestdef doNum(request):num1 = request.num1num2 = request.num2sum = num1 + num2response =AddintsResponse()response.sum = sumrospy.loginfo("服务器解析的数据num1 = %d, num2 = %d,响应的结果: sum = %d",num1,num2,sum)return responsedef server():rospy.init_node("company")server = rospy.Service("addInts",Addints,doNum)rospy.loginfo("服务器已经启动了")rospy.spin()if __name__=="__main__":server()
重点语法、接口等的复现与记忆以及一些注意事项:
1.实例化服务端对象**rospy.Service("话题名",数据类,回调函数)。
2.导包的时候为了方便可以使用通配符*,需要将Response类和Request类都导入。
3.可以这么理解:AddInts是一个大数据类,而AddIntsResponse和AddIntsRequest是AddInts.srv文件编译之后产生的子类。(不准确的说是一分为二)
在产生的中间文件中便可发现继承关系**。所以我们在服务端是用AddIntsResponse实例化对象,在客户端用AddIntsRequest实例化对象,而不是用AddInts实例化对象。
4.回调函数自动接收的参数是请求类型的(在本例中是两个数据),然后需要将数据取出来进行处理num1 = request.num1 num2 = request.num2 sum = num1 + num2。
5.处理过后的结果放入实例化的response=AddintsResponse()对象中,然后存入处理过后的数据结果response.sum=sum,并返回response。
6.有回调函数都需要使用rospy.spin()。
1.3.1.客户端实现:
#! usr/bin/env pythonimport rospy
from plumbing_server_client.srv import *
import sys# ROS中内置了相关函数,这些函数可以判断服务器的状态,如果服务没有启动,那么就让客户端挂起。def client():if len(sys.argv)!=3 :#包括一个默认的参数rospy.loginfo("传入的参数个数有误")sys.exit(1)rospy.init_node("me")client = rospy.ServiceProxy("addInts",Addints) #实例化客户端对象num1 = int (sys.argv[1])num2 = int (sys.argv[2])#等待服务器启动client.wait_for_service()#如果用rospy.wait_for_service("这里面需要话题名称")response = client.call(num1,num2)#组织请求数据,并发送请求,接收响应数据rospy.loginfo("响应的数据:%d",response.sum)# 处理响应if __name__=="__main__":client()
重点语法、接口等的复现与记忆以及一些注意事项:
1.实例化客户端对象client=rospy.ServiceProxy("话题名",数据类),注意这里不是rospy.client,它是一个方法。
2.组织请求数据,并发送请求,接收相应数据。用已经实例化的客户端对象client.call(num1,num2),接收数据response=client.call(num1,num2)
优化:
3.从终端中传入参数:导入sys包,判断参数是否为三个(第一个参数为文件名,加上两个数字应该是三个)
if len(sys.argv)!=3 :#包括一个默认的参数rospy.loginfo("传入的参数个数有误")sys.exit(1)
不满足条件就打印错误日志信息并退出。len(sys.args)用来获取终端中传入的参数个数,sys.argv是一个列表(list)/数组,里面存放参数(字符),所以取出的时候应该使用下标引用操作符并进行强制转换。
num1 = int (sys.argv[1])num2 = int (sys.argv[2])
4.解决先打开客户端抛出异常的问题:
client.wait_for_service()#如果用rospy.wait_for_service("这里面需要话题名称")
加在发送请求前即可。
1.4.参数服务器:
1.设置参数:
rospy.set_param("参数名(键)",value(值))
如:
rospy.set_param("type_p","car")rospy.set_param("radius_p",0.15)
复用可以实现覆盖(修改)
查看参数列表:
rosparam list
查看参数值:
rosparam get <参数名>
2.查询参数:
相关函数有:(rospy包中)
1.
get_param(“参数名”,默认值)#当参数存在时,返回对应的值,不存在返回默认值。
2.get_param_cached(“参数名”,默认值),与get_param使用方法一致,只是效率更高。
3.get_param_names(),获取所有参数名(键)的集合,可用for names in names来遍历输出。
4.has_param("参数名"),判断某个参数是否存在,返回true or false
5.search_param("参数名"),查找某个参数的键(/参数名)
3.删除参数:
rospy.delete_param("参数名")
1.5.URDF集成Rviz基本流程:
1.5.1.新建功能包,导入依赖:

由于不涉及编写py/cpp文件,所以不需要导入roscpp、rospy等功能包。需要导入urdf、xacro依赖。
在功能包路径下创建以下四个文件夹。
1.5.2.编写urdf文件:
<robot name="myCar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1"/></geometry></visual></link>
</robot>
一定要要注意/的位置!!!!!!!!!
1.5.3.在launch文件集成URDF与Rviz:
<launch><!-- 在参数服务器载入urdf文件 --><param name="robot_description" textfile="$(find urdf01_rviz)/urdf/car.urdf"/><!-- 启动Rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_myCar.rviz "/></launch>
------------------------ 在参数服务器载入urdf文件 ------------------------
robot name固定(robot_description),文件路径格式:$(find 包名)路径到文件
--------------------------------- 启动Rviz ---------------------------------
pkg、type、name都是rviz,后面的args是rviz配置文件的路径,该配置文件最好放在当前功能包下的config文件夹中。
1.5.4.在Rviz中显示机器人模型:
用roslaunch启动。
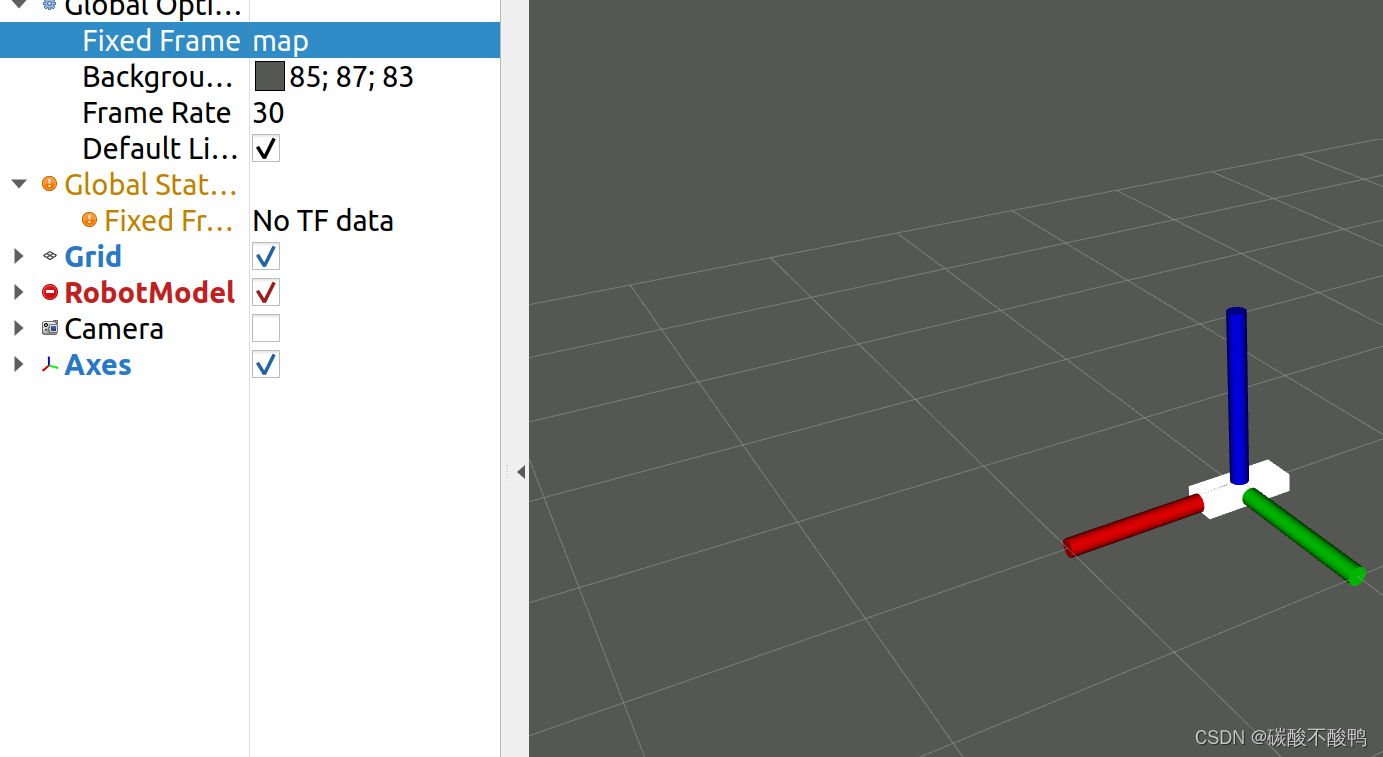
添加RobotModel、Axes,然后将FIxed Frame设置为base_link
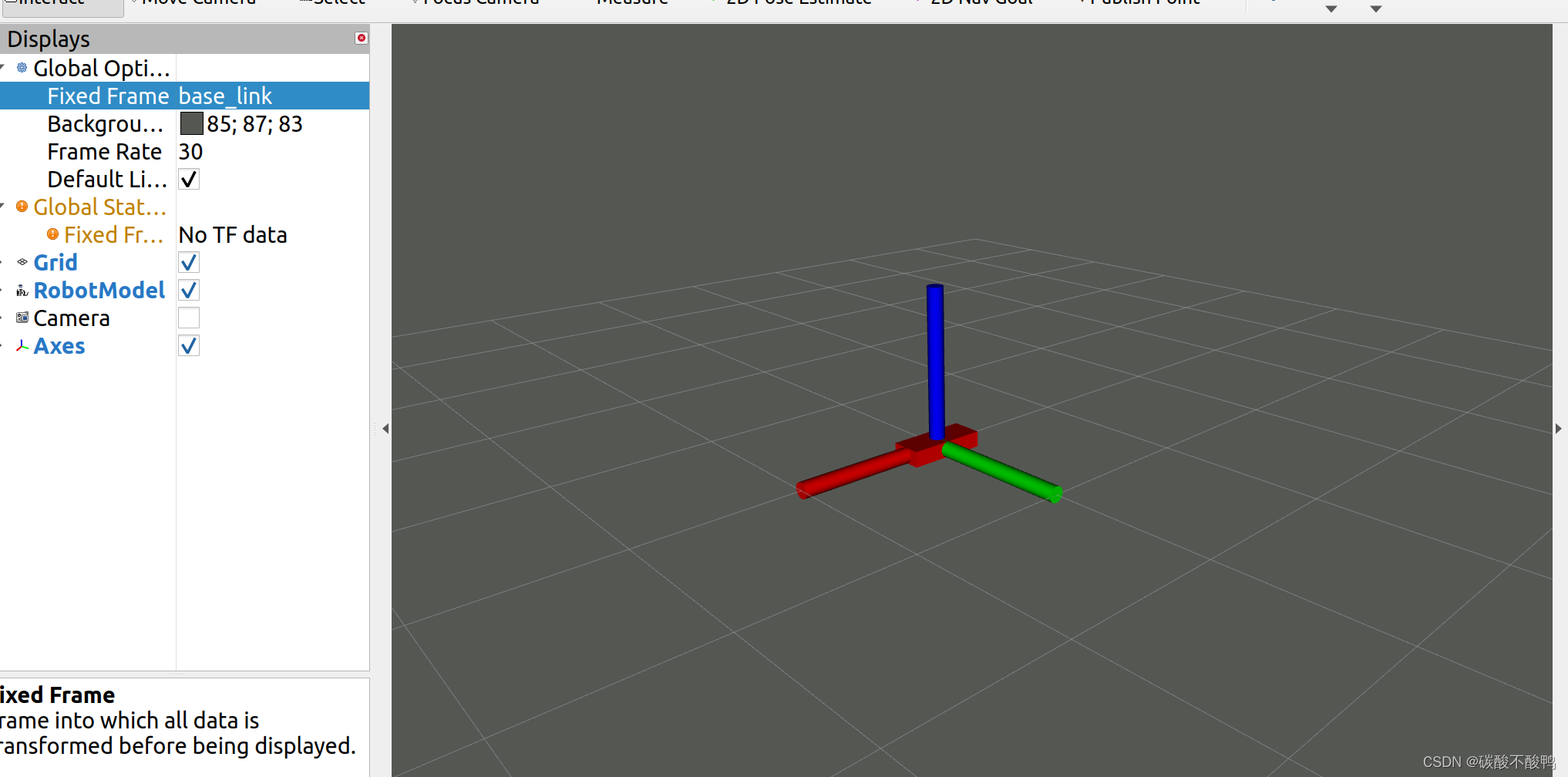
成功显示模型。
1.6.再识URDF标签:
成双标签/加在第二个最前面,单标签/加在最后面。
1.6.1.link:
link和robot标签都有name的属性。
visual(描述外观):
geometry(设置连杆形状):
标签1:
box(盒状),属性:size=“长 宽 高”
标签2:
cylinder(圆柱),属性:radius="半径 length=“高”
标签3:
sphere(球体),属性:radius=“半径”
标签4:
mesh(为连杆添加皮肤),属性filename=“路径”(格式:package://功能包名/路径到文件)
origin(设置偏移量与倾斜角度):
属性1:
xyz="x偏移 y偏移 z偏移 "
属性2:
rpy=“x翻滚量 y俯仰量 z偏航量”(单位是弧度)
material(设置颜色):
material含有name属性。
标签1:
color,属性rgba(红绿蓝透明度)=“x y z a”(四者取值[0,1])
碰撞参数等:
后续介绍。
1.6.2.joint:
有两个属性:name和type
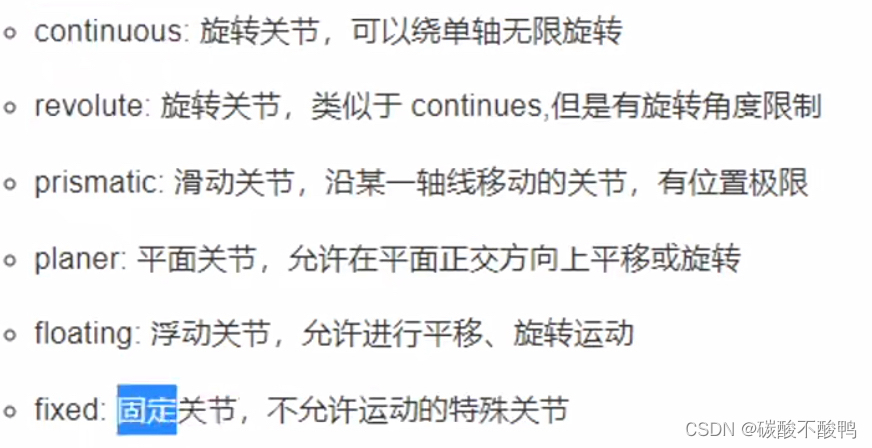
其中type包括:
parent (必须):
属性:
link=“父link名”
child link:
属性:
link=“子link名”
origin:
属性:
xyz=“x y z”(各轴线上的偏移量) rpy=“r p y”(各轴线上的偏移弧度)
axis:(需要转动的关节需要设置这个参数)
属性:
**xyz用于设置围绕哪个轴运动。**xyz=“ 0 0 1 ”表示绕z轴旋转
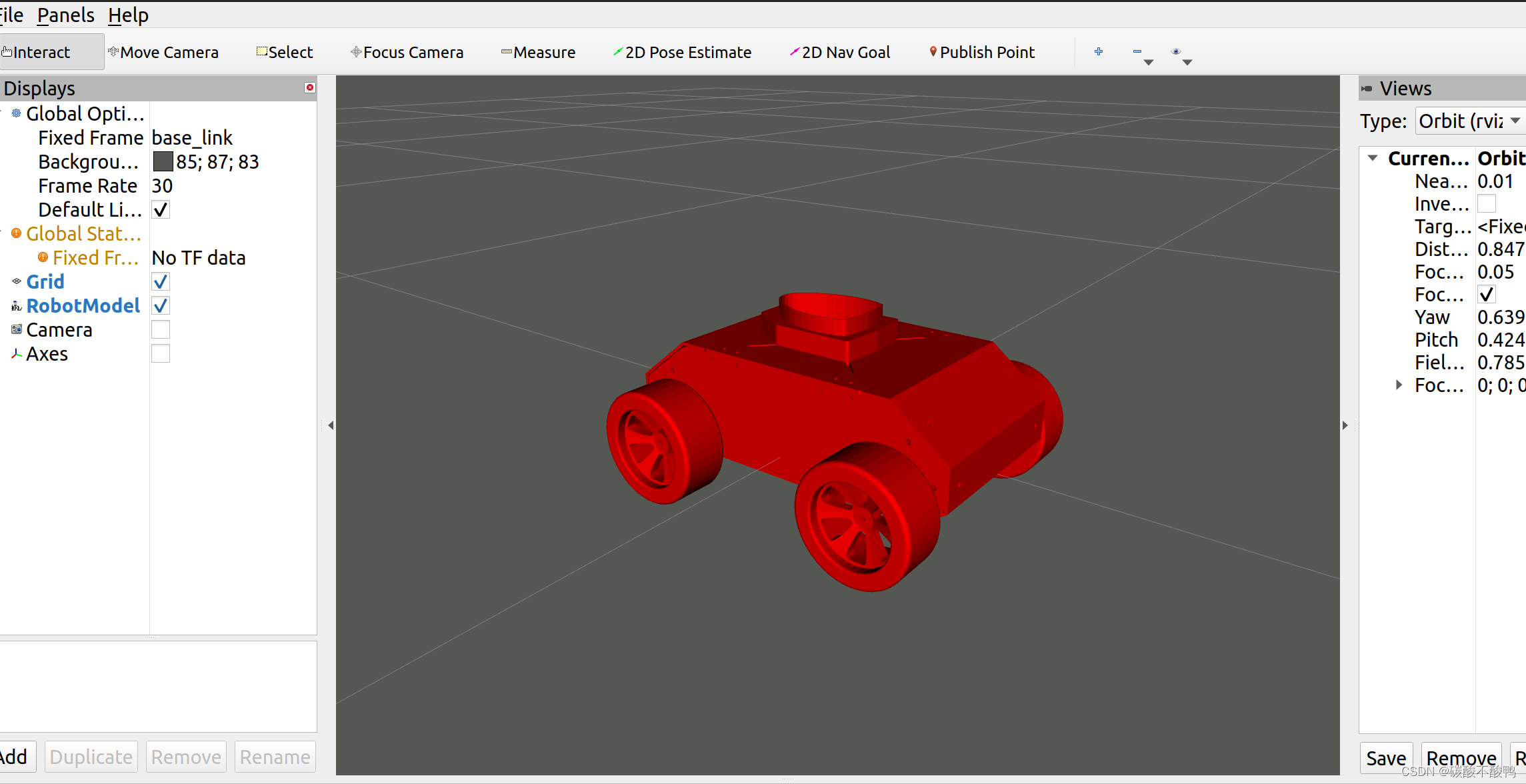
1.6.3. 完成小车仿真并加载到launch文件中:
编写urdf文件:
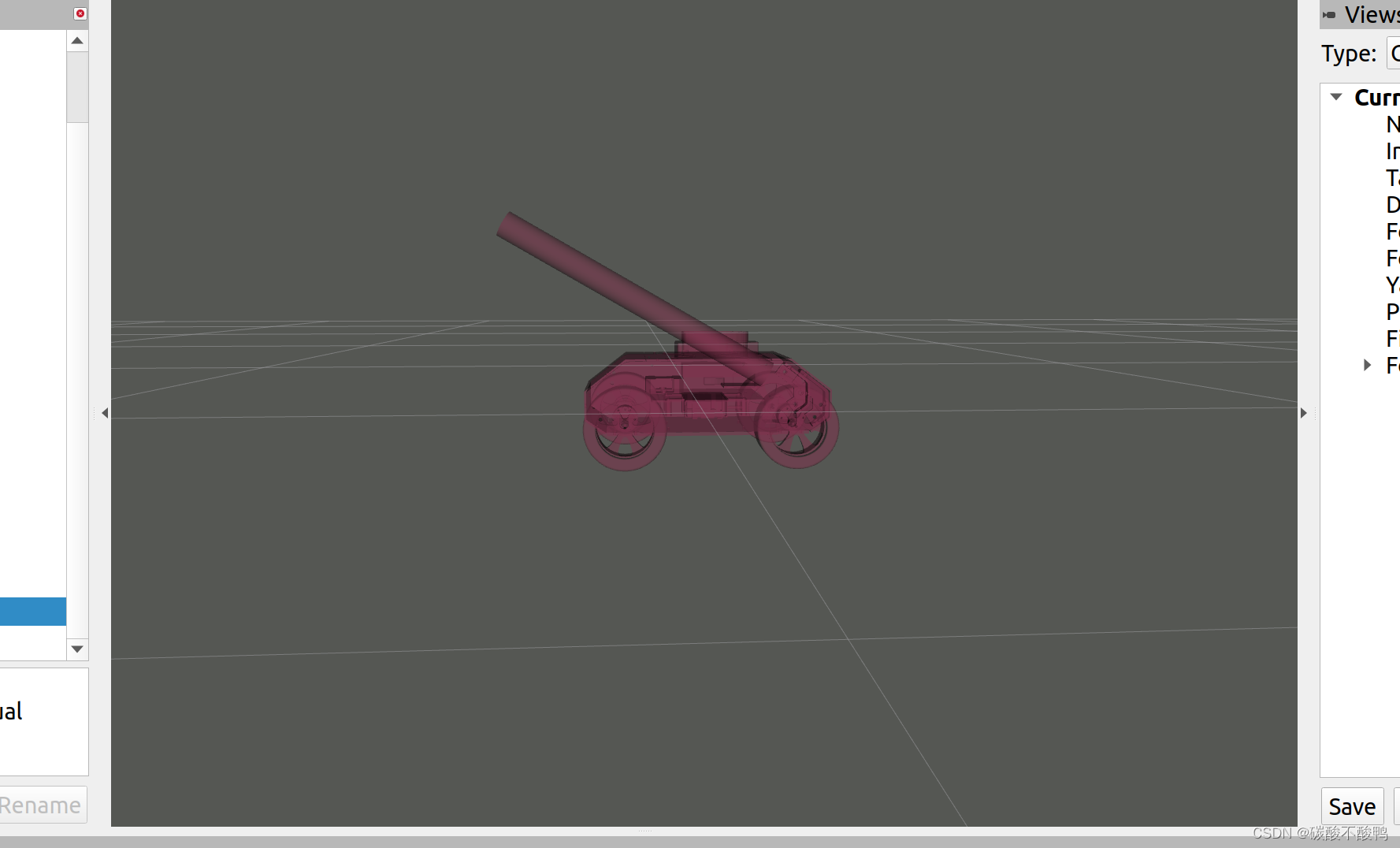
小炮车(mesh)
0.17" rpy="0.0 1.05 1.57"/></joint><link name="paoGuan"><visual><geometry><cylinder radius="0.02" length="0.45"/></geometry><material name="color"><color rgba="1.0 0.2 0.3 0.55"/></material> </visual></link>
</robot>
简陋小车:(带camera)
<robot name="myCar"><link name="base_link"><visual><geometry><box size="0.3 0.2 0.1"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="color"><color rgba="0.8 0.5 0.0 0.5"/></material></visual></link><link name="cam"><visual><geometry><box size="0.02 0.05 0.05"/></geometry><origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/><material name="cam_color"><color rgba="0 0 1 0.5"/></material></visual></link><joint name="camera2Base" type="continuous"><parent link="base_link"/><child link="cam"/><origin xyz="0.12 0 0.05" rpy="0.0 0.0 0.0"/><axis xyz="0 0 1"/> </joint>
</robot>
1.关节优先:
关节的位置确定了子连杆和父连杆的相对位置关系,关节的参考系是主参考系,而子连杆的参考系是以关节为中心的参考系。
2.配置机器人状态发布者及相关节点:
要成功显示机器人模型,需要在launch文件中添加:
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher"/>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"/>
如果要查看机器人关节旋转效果,需要在launch文件中添加:
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"/>
并注释关节信息发布节点(解决cam抖动的问题)。
3.关节中心(位置)默认与父连杆中心重合
1.6.4.base_footprint优化urdf:
默认情况下,底盘中心点位于地图原点上,所以会导致机器人模型半沉入地下,可以使用优化策略,将初始link设置为一个尺寸极小的link(如半径为0.001m的球体或边长为0.001的立方体),然后再在初始link上添加底盘等刚体,这样实现,虽然仍然存在半沉现象,但可以基本忽略。
添加初始link:
<link name="base_footprint"><visual><geometry><box size="0.001 0.001 0.001"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="color"><color rgba="0.8 0.5 0.0 0.5"/></material></visual></link>
添加关节:
<joint name="fp" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0 0 0.05" rpy="0.0 0.0 0.0"/></joint>
注意将base_footprint作为父连杆。