天津建设部网站保温指数运算公式大全
https://download.csdn.net/download/qq_45685327/87725276
1.新建launch文件
关于launch文件的实现,在amcl功能包下的example目录已经给出了示例,可以作为参考,具体实现:
roscd amcl
ls examples
gedit amcl_diff.launch该目录下会列出两个文件: amcl_diff.launch 和 amcl_omni.launch 文件,前者适用于差分移动机器人,后者适用于全向移动机器人,可以按需选择,此处参考前者,新建 launch 文件,复制 amcl_diff.launch 文件内容并修改如下:
nv04_amcl.launch
<launch><node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 --><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="30"/><param name="min_particles" value="500"/><param name="max_particles" value="5000"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><param name="laser_model_type" value="likelihood_field"/><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 --><param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 --><param name="global_frame_id" value="map"/><!-- 添加地图坐标系 --><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/></node>
</launch>
2.编写测试launch文件
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件,内容示例如下:
<launch><!-- 设置地图的配置文件 --><arg name="map" default="nav.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find mycar_nav)/map/$(arg map)"/><!-- 启动AMCL节点 --><include file="$(find mycar_nav)/launch/amcl.launch" /><!-- 运行rviz --><node pkg="rviz" type="rviz" name="rviz"/>
</launch>3.执行
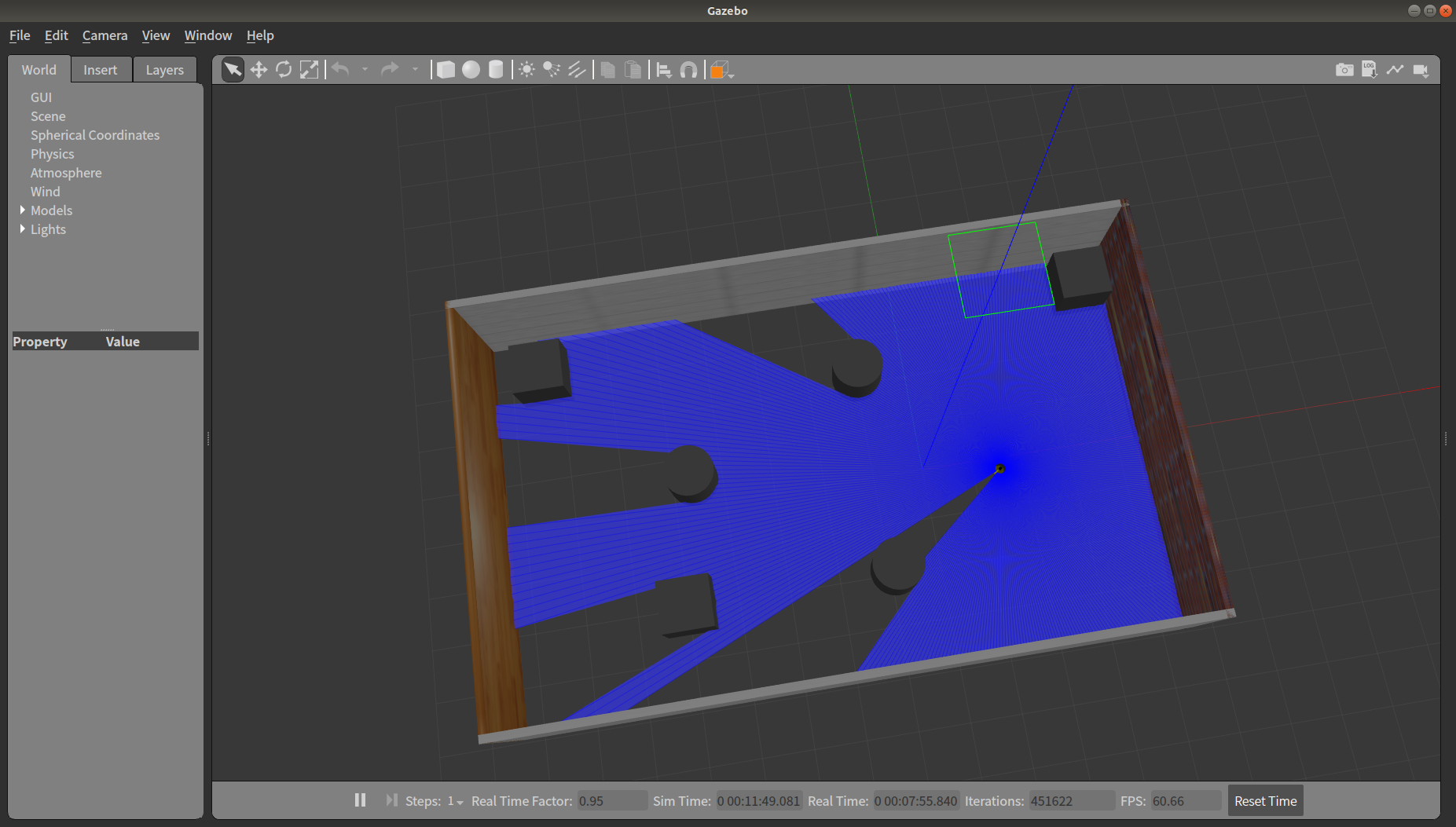
3.1先启动 Gazebo 仿真环境
roslaunch urdf02_gazebo deamo03_car_world.launch3.2启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
3.3启动test_amcl.launch
上一步中集成地图服务、amcl 与 rviz 的 launch 文件;
roslaunch nav_demo test_amcl.launch3.4添加组件,显示效果
在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
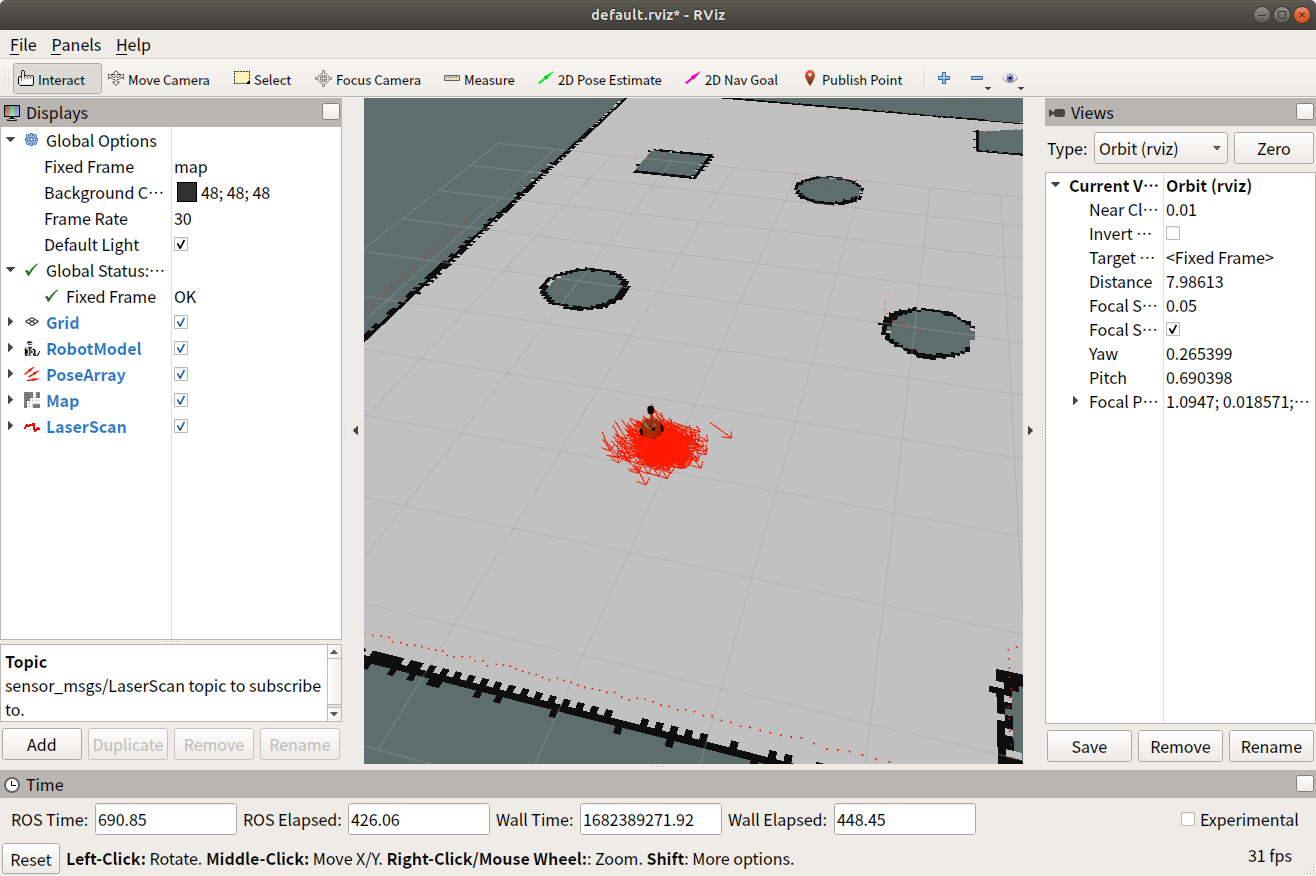
通过键盘控制机器人运动,会发现 posearray 也随之而改变。