seo 网站描述长度石家庄百度搜索优化
1. 配置launch文件
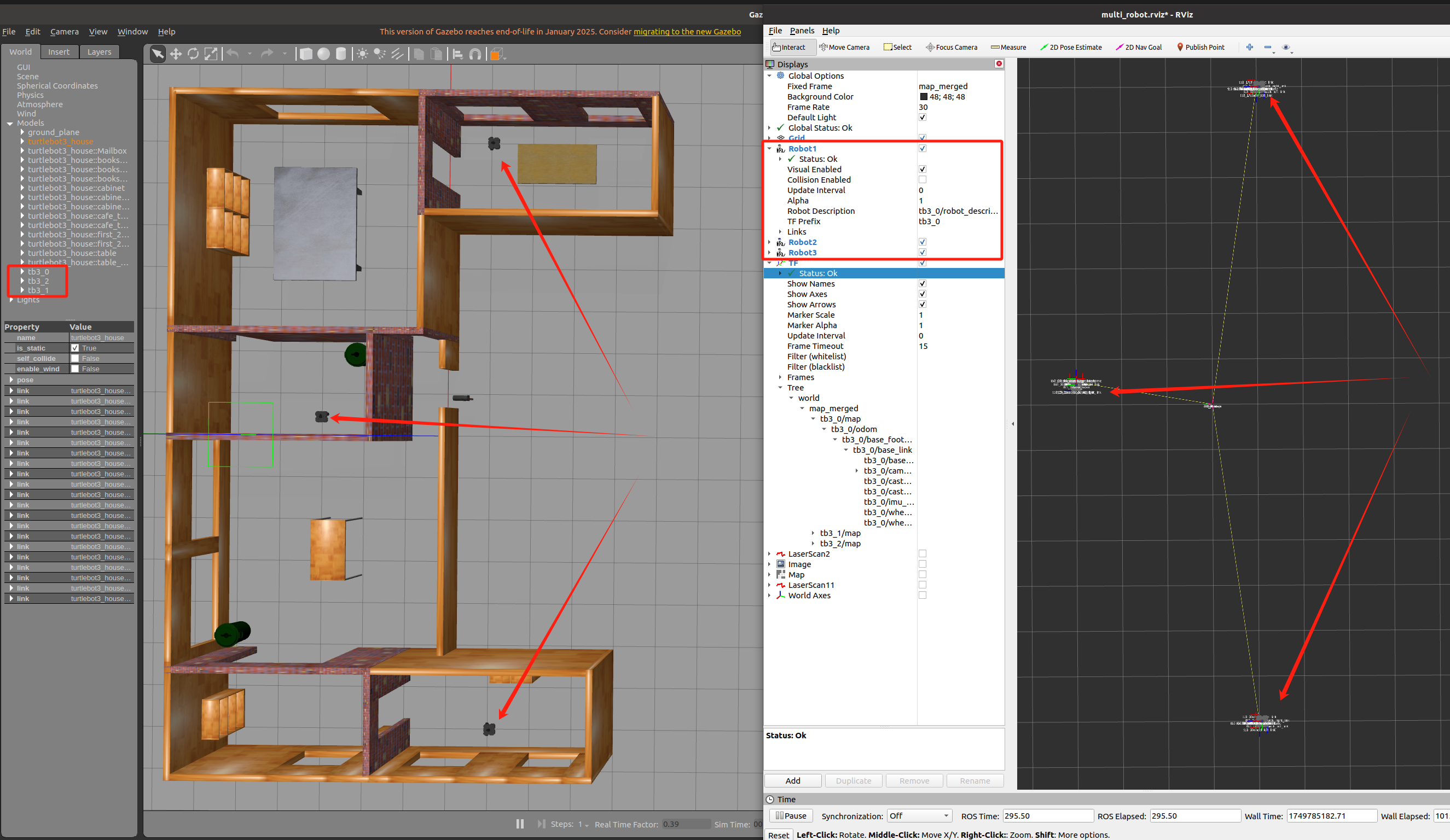
gazebo的加载相对容易,但rviz中加载,需要构建完整的tf树(world → map(或map_merged)→ odom → base_footprint → base_link → base_scan)才能正常显示,launch文件主要是在构建tf树。
<launch><arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/><arg name="first_tb3" default="tb3_0"/><arg name="second_tb3" default="tb3_1"/><arg name="third_tb3" default="tb3_2"/><arg name="first_tb3_x_pos" default="-7.0"/><arg name="first_tb3_y_pos" default="-1.0"/><arg name="first_tb3_z_pos" default=" 0.0"/><arg name="first_tb3_yaw" default=" 1.57"/><arg name="second_tb3_x_pos" default=" 7.0"/><arg name="second_tb3_y_pos" default="-1.0"/><arg name="second_tb3_z_pos" default=" 0.0"/><arg name="second_tb3_yaw" default=" 1.57"/><arg name="third_tb3_x_pos" default=" 0.5"/><arg name="third_tb3_y_pos" default=" 3.0"/><arg name="third_tb3_z_pos" default=" 0.0"/><arg name="third_tb3_yaw" default=" 0.0"/><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_house.world"/><arg name="paused" value="false"/><arg name="use_sim_time" value="true"/><arg name="gui" value="true"/><arg name="headless" value="false"/><arg name="debug" value="false"/></include> <group ns = "$(arg first_tb3)"><arg name="robot_name" default="$(arg first_tb3)"/><arg name="tf_prefix" value="$(arg robot_name)"/><param name="robot_description" command="$(find xacro)/xacro $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro tf_prefix:=$(arg robot_name)" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen"><param name="publish_frequency" type="double" value="50.0" /><param name="tf_prefix" value="$(arg first_tb3)" /></node><node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-urdf -model $(arg first_tb3) -x $(arg first_tb3_x_pos) -y $(arg first_tb3_y_pos) -z $(arg first_tb3_z_pos) -Y $(arg first_tb3_yaw) -param robot_description" /><!-- TF 变换:从融合地图到机器人局部地图 --><node pkg="tf" type="static_transform_publisher" name="map_merged_to_robot1_map"args="$0 0 0 0 0 0 map_merged $(arg tf_prefix)/map 100" /> <node pkg="tf" type="static_transform_publisher" name="robot1_map_to_robot1_odom"args="$0 0 0 0 0 0 $(arg tf_prefix)/map $(arg tf_prefix)/odom 100" /> </group><group ns = "$(arg second_tb3)"><arg name="robot_name" default="$(arg second_tb3)"/><arg name="tf_prefix" value="$(arg robot_name)"/><param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro tf_prefix:=$(arg robot_name)" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen"><param name="publish_frequency" type="double" value="50.0" /><param name="tf_prefix" value="$(arg second_tb3)" /></node><node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-urdf -model $(arg second_tb3) -x $(arg second_tb3_x_pos) -y $(arg second_tb3_y_pos) -z $(arg second_tb3_z_pos) -Y $(arg second_tb3_yaw) -param robot_description" /><!-- TF 变换:从融合地图到机器人局部地图 --><node pkg="tf" type="static_transform_publisher" name="map_merged_to_robot2_map"args="$0 0 0 0 0 0 map_merged $(arg tf_prefix)/map 100" /> <node pkg="tf" type="static_transform_publisher" name="robot2_map_to_robot2_odom"args="$0 0 0 0 0 0 $(arg tf_prefix)/map $(arg tf_prefix)/odom 100" /> </group><group ns = "$(arg third_tb3)"><arg name="robot_name" default="$(arg third_tb3)"/><arg name="tf_prefix" value="$(arg robot_name)"/><param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro tf_prefix:=$(arg robot_name)" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen"><param name="publish_frequency" type="double" value="50.0" /><param name="tf_prefix" value="$(arg third_tb3)" /></node><node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-urdf -model $(arg third_tb3) -x $(arg third_tb3_x_pos) -y $(arg third_tb3_y_pos) -z $(arg third_tb3_z_pos) -Y $(arg third_tb3_yaw) -param robot_description" /><!-- TF 变换:从融合地图到机器人局部地图 --><node pkg="tf" type="static_transform_publisher" name="map_merged_to_robot3_map"args="$0 0 0 0 0 0 map_merged $(arg tf_prefix)/map 100" /> <node pkg="tf" type="static_transform_publisher" name="robot3_map_to_robot3_odom"args="$0 0 0 0 0 0 $(arg tf_prefix)/map $(arg tf_prefix)/odom 100" /> </group><node pkg="tf" type="static_transform_publisher" name="world_to_map_merged" args="0 0 0 0 0 0 world map_merged 100" /><!-- 启动RViz --><node pkg="rviz" type="rviz" name="rviz" required="true" args="-d $(find multi_robot)/config/multi_robot.rviz"/> </launch>2. 修改urdf模型
nano ~/catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_waffle_pi.gazebo.xacro
为各机器人增加tb3/odom->tb3/base_footprint的tf映射,防止odom->base_footprint全局tf映射。
<gazebo><plugin name="turtlebot3_waffle_pi_controller" filename="libgazebo_ros_diff_drive.so"><commandTopic>cmd_vel</commandTopic><odometryTopic>$(arg tf_prefix)/odom</odometryTopic><odometryFrame>$(arg tf_prefix)/odom</odometryFrame><odometrySource>world</odometrySource><publishOdomTF>true</publishOdomTF><robotBaseFrame>$(arg tf_prefix)/base_footprint</robotBaseFrame><publishWheelTF>false</publishWheelTF><publishTf>true</publishTf><publishWheelJointState>true</publishWheelJointState><legacyMode>false</legacyMode><updateRate>30</updateRate><leftJoint>wheel_left_joint</leftJoint><rightJoint>wheel_right_joint</rightJoint><wheelSeparation>0.287</wheelSeparation><wheelDiameter>0.066</wheelDiameter><wheelAcceleration>1</wheelAcceleration><wheelTorque>10</wheelTorque><rosDebugLevel>na</rosDebugLevel></plugin></gazebo>
3. 执行
roslaunch turtlebot3_gazebo multi_turtlebot3_rviz.launch