常见的营销策略有哪些百度关键词快速优化
前言
一个月前安装了一下这个包,但是有报错。现在换了一个强劲的电脑,内存64G ,显存39G ,终于跑起来了,没有报错。网页控制器可以控制RVIZ中的机器人旋转。
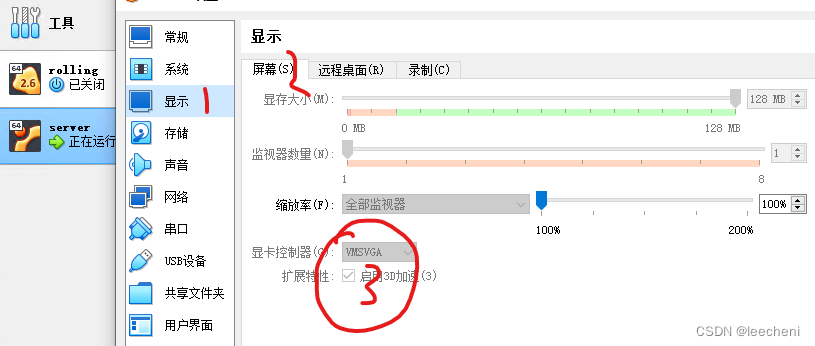
vituralBOX中3D加速要勾选,这样才能发挥独立显卡的作业,才能让虚拟机不卡顿。
我是通过远程桌面去访问这个强劲电脑,因网速问题略微卡顿,不太影响。
1.加载虚拟控制器
这个加载的时候,非root用户会提示权限不够,切换到根用户,
sudo su会提示找不到ros2
cheni@yuchen:~$ ros2 run ur_client_library start_ursim.sh -m ur10Got permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Get "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/networks/ursim_net": dial unix /var/run/docker.sock: connect: permission deniedCreating ursim_netGot permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Post "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/networks/create": dial unix /var/run/docker.sock: connect: permission denieddocker: Got permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Post "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/containers/create?name=ursim": dial unix /var/run/docker.sock: connect: permission denied.See 'docker run --help'.[ros2run]: Process exited with failure 126先source一下再运行就好
root@yuchen:/home/cheni# source /opt/ros/rolling/setup.sh
root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10
效果如下:
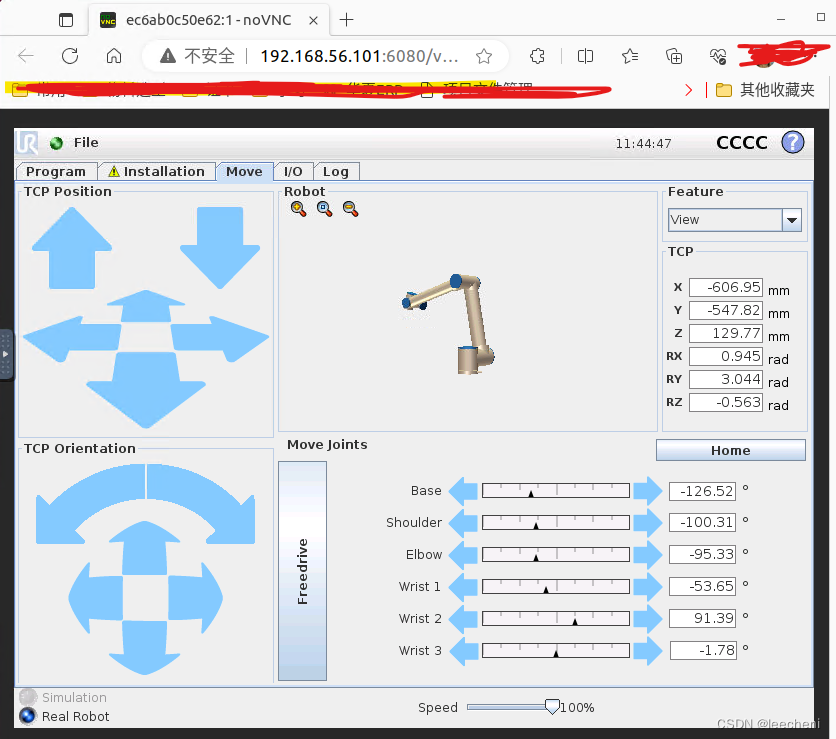
root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10% Total % Received % Xferd Average Speed Time Time Time CurrentDload Upload Total Spent Left Speed0 0 0 0 0 0 0 0 --:--:-- 0:02:00 --:--:-- 0curl: (56) OpenSSL SSL_read: error:0A000126:SSL routines::unexpected eof while reading, errno 0ursim_net already exists37786d6c6b225e044706e8bef35af83ccd6dd1e79cb1194747cd44bd23e1bbecDocker URSim is runningTo access Polyscope, open the following URL in a web browser.http://192.168.56.101:6080/vnc.htmlTo exit, press CTRL+C^CkillingError response from daemon: Cannot kill container: ursim: No such container: ursim[ros2run]: Process exited with failure 1root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10% Total % Received % Xferd Average Speed Time Time Time CurrentDload Upload Total Spent Left Speed0 0 0 0 0 0 0 0 --:--:-- 0:02:11 --:--:-- 0curl: (28) Failed to connect to github.com port 443 after 131175 ms: 连接超时ursim_net already existsec6ab0c50e626867e20ada8b21ff182586d2fa02f866d83d35bc819b9a09d83aDocker URSim is runningTo access Polyscope, open the following URL in a web browser.http://192.168.56.101:6080/vnc.htmlTo exit, press CTRL+C2.打开浏览器进行连接
效果如下,想改成中文,测试了不成功。只能看英文的了。点击到这个界面就好。
3.启动rviz
cheni@yuchen:~$ ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur10 robot_ip:=192.168.56.101 launch_rviz:=true[INFO] [launch]: All log files can be found below /home/cheni/.ros/log/2023-10-18-17-16-40-997672-yuchen-19246[INFO] [launch]: Default logging verbosity is set to INFO[INFO] [dashboard_client-2]: process started with pid [19254][INFO] [controller_stopper_node-3]: process started with pid [19256][INFO] [ur_ros2_control_node-1]: process started with pid [19252][INFO] [urscript_interface-4]: process started with pid [19258][INFO] [robot_state_publisher-5]: process started with pid [19260][INFO] [rviz2-6]: process started with pid [19262][INFO] [spawner-7]: process started with pid [19264][INFO] [spawner-8]: process started with pid [19266][INFO] [spawner-9]: process started with pid [19268][INFO] [spawner-10]: process started with pid [19270][INFO] [spawner-11]: process started with pid [19272][INFO] [spawner-12]: process started with pid [19274][rviz2-6] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.[controller_stopper_node-3] [INFO] [1697620601.585913917] [Controller stopper]: Waiting for switch controller service to come up on controller_manager/switch_controller[ur_ros2_control_node-1] [WARN] [1697620601.599039497] [controller_manager]: [Deprecated] Passing the robot description parameter directly to the control_manager node is deprecated. Use '~/robot_description' topic from 'robot_state_publisher' instead.[ur_ros2_control_node-1] text not specified in the tf_prefix tag[ur_ros2_control_node-1] [INFO] [1697620601.599400048] [resource_manager]: Loading hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601241897] [resource_manager]: Initialize hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601288221] [resource_manager]: Successful initialization of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697620601.601398129] [resource_manager]: 'configure' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601402703] [resource_manager]: Successful 'configure' of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697620601.601416810] [resource_manager]: 'activate' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601421726] [URPositionHardwareInterface]: Starting ...please wait...[ur_ros2_control_node-1] [INFO] [1697620601.601428857] [URPositionHardwareInterface]: Initializing driver...[robot_state_publisher-5] [INFO] [1697620601.604043017] [robot_state_publisher]: Robot initialized[rviz2-6] [INFO] [1697620601.895750788] [rviz2]: Stereo is NOT SUPPORTED[rviz2-6] [INFO] [1697620601.895889721] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)[rviz2-6] [INFO] [1697620601.925227291] [rviz2]: Stereo is NOT SUPPORTED[spawner-7] [INFO] [1697620603.756785754] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620603.767271620] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620603.790952404] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620603.824011749] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620603.836708094] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620603.859390892] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[dashboard_client-2] [ERROR] [1697620604.617355057] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620604.617367336] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[spawner-7] [INFO] [1697620605.770359059] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620605.780972574] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620605.801798313] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620605.840607511] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620605.853351245] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620605.869930016] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [spawner-7] [INFO] [1697620607.784794710] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620607.791828202] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620607.816176219] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620607.853336202] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620607.872221126] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620607.886508104] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697620609.796913481] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620609.801278996] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620609.829892511] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620609.863629439] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620609.886876876] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620609.898657037] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [ERROR] [1697620611.815283050] [spawner_joint_state_broadcaster]: Controller manager not available[spawner-7] [ERROR] [1697620611.815343330] [spawner_scaled_joint_trajectory_controller]: Controller manager not available[spawner-9] [ERROR] [1697620611.850509388] [spawner_io_and_status_controller]: Controller manager not available[spawner-11] [ERROR] [1697620611.877378395] [spawner_force_torque_sensor_broadcaster]: Controller manager not available[spawner-10] [ERROR] [1697620611.898880900] [spawner_speed_scaling_state_broadcaster]: Controller manager not available[spawner-12] [ERROR] [1697620611.918231227] [spawner_forward_position_controller]: Controller manager not available[ERROR] [spawner-8]: process has died [pid 19266, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner joint_state_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-7]: process has died [pid 19264, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner scaled_joint_trajectory_controller -c /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-9]: process has died [pid 19268, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner io_and_status_controller --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-11]: process has died [pid 19272, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner force_torque_sensor_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-10]: process has died [pid 19270, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner speed_scaling_state_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-12]: process has died [pid 19274, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner forward_position_controller --controller-manager /controller_manager --controller-manager-timeout 10 --inactive --ros-args'].[ur_ros2_control_node-1] [ERROR] [1697620617.674695116] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620617.674854194] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620630.730729841] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620630.730757786] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620643.786044906] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620643.786084098] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620656.844871224] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620656.844879031] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620669.897358065] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620669.897412139] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620682.957343109] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620682.957419768] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620696.009247417] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620696.009280643] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620709.067121860] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620709.067121907] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620722.121106520] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620722.121155433] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [rviz2-6] [ERROR] [1697620734.066237695] [rviz2]: Failed to open /opt/ros/rolling/share/ur_description/rviz/view_robot.rviz for writing.[ur_ros2_control_node-1] [ERROR] [1697620735.177713915] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620735.177713751] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620748.234146646] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620748.234196430] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620761.290381017] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620761.290386082] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620774.345313786] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620774.345364767] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620787.401409613] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620787.401416073] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620800.457585346] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620800.457611877] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620813.519876814] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620813.519954753] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620826.570448827] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620826.570450183] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620839.626253307] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620839.626252825] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620852.681166419] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620852.681139780] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620865.738521330] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620865.739197737] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620878.793494446] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620878.793533192] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620891.853834705] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620891.853849910] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620904.905491272] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620904.905613071] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620917.961366189] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620917.961403904] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620931.017307838] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620931.017324588] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620944.073232461] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620944.073208368] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620957.129724062] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620957.129786765] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620970.185587415] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620970.185625411] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620983.244408711] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620983.244616094] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620996.297661450] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620996.297665241] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621009.353842812] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621009.353832578] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621022.410149541] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621022.410149571] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621035.465370042] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621035.465344708] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621048.521965941] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621048.521969959] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)[dashboard_client-2] [INFO] [1697621051.328878010] [rclcpp]: signal_handler(signum=2)[controller_stopper_node-3] [INFO] [1697621051.328888069] [rclcpp]: signal_handler(signum=2)[controller_stopper_node-3] [INFO] [1697621051.329342045] [Controller stopper]: Service available[controller_stopper_node-3] [INFO] [1697621051.329359168] [Controller stopper]: Waiting for list controllers service to come up on controller_manager/list_controllers[controller_stopper_node-3] [INFO] [1697621051.329367216] [Controller stopper]: Service available[controller_stopper_node-3] [controller_stopper_node-3] >>> [rcutils|error_handling.c:108] rcutils_set_error_state()[controller_stopper_node-3] This error state is being overwritten:[controller_stopper_node-3] [controller_stopper_node-3] 'rcl node's context is invalid, at ./src/rcl/node.c:405'[controller_stopper_node-3] [controller_stopper_node-3] with this new error message:[controller_stopper_node-3] [controller_stopper_node-3] 'publisher's context is invalid, at ./src/rcl/publisher.c:424'[controller_stopper_node-3] [controller_stopper_node-3] rcutils_reset_error() should be called after error handling to avoid this.[controller_stopper_node-3] <<<[controller_stopper_node-3] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError'[controller_stopper_node-3] what(): failed to create guard condition: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at ./src/rcl/guard_condition.c:67[rviz2-6] [INFO] [1697621051.328744551] [rclcpp]: signal_handler(signum=2)[robot_state_publisher-5] [INFO] [1697621051.328757334] [rclcpp]: signal_handler(signum=2)[ur_ros2_control_node-1] [INFO] [1697621051.328858453] [rclcpp]: signal_handler(signum=2)[urscript_interface-4] [INFO] [1697621051.328813758] [rclcpp]: signal_handler(signum=2)[INFO] [robot_state_publisher-5]: process has finished cleanly [pid 19260][INFO] [rviz2-6]: process has finished cleanly [pid 19262][urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ERROR] [controller_stopper_node-3]: process has died [pid 19256, exit code -6, cmd '/opt/ros/rolling/lib/ur_robot_driver/controller_stopper_node --ros-args -r __node:=controller_stopper --params-file /tmp/launch_params_vfxkhuw3 --params-file /tmp/launch_params_6shznysc --params-file /tmp/launch_params_aqbhos7w'].[ERROR] [urscript_interface-4]: process[urscript_interface-4] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[ERROR] [dashboard_client-2]: process[dashboard_client-2] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[ERROR] [ur_ros2_control_node-1]: process[ur_ros2_control_node-1] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[INFO] [urscript_interface-4]: sending signal 'SIGTERM' to process[urscript_interface-4][INFO] [dashboard_client-2]: sending signal 'SIGTERM' to process[dashboard_client-2][INFO] [ur_ros2_control_node-1]: sending signal 'SIGTERM' to process[ur_ros2_control_node-1][urscript_interface-4] [INFO] [1697621056.339854857] [rclcpp]: signal_handler(signum=15)[dashboard_client-2] [INFO] [1697621056.340825489] [rclcpp]: signal_handler(signum=15)[ur_ros2_control_node-1] [INFO] [1697621056.342180730] [rclcpp]: signal_handler(signum=15)[ERROR] [urscript_interface-4]: process[urscript_interface-4] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[ERROR] [dashboard_client-2]: process[dashboard_client-2] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[ERROR] [ur_ros2_control_node-1]: process[ur_ros2_control_node-1] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[INFO] [urscript_interface-4]: sending signal 'SIGKILL' to process[urscript_interface-4][INFO] [dashboard_client-2]: sending signal 'SIGKILL' to process[dashboard_client-2][INFO] [ur_ros2_control_node-1]: sending signal 'SIGKILL' to process[ur_ros2_control_node-1][ERROR] [urscript_interface-4]: process has died [pid 19258, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/urscript_interface --ros-args --params-file /tmp/launch_params_nb_ud0iw'].[ERROR] [dashboard_client-2]: process has died [pid 19254, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/dashboard_client --ros-args -r __node:=dashboard_client --params-file /tmp/launch_params_x40xzydl'].[ERROR] [ur_ros2_control_node-1]: process has died [pid 19252, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/ur_ros2_control_node --ros-args --params-file /tmp/launch_params_aplj4v_p --params-file /opt/ros/rolling/share/ur_robot_driver/config/ur10_update_rate.yaml --params-file /tmp/launch_params_kh4tysuh'].cheni@yuchen:~$ ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur10 robot_ip:=192.168.56.101 launch_rviz:=true[INFO] [launch]: All log files can be found below /home/cheni/.ros/log/2023-10-18-17-27-27-837054-yuchen-23621[INFO] [launch]: Default logging verbosity is set to INFO[INFO] [dashboard_client-2]: process started with pid [23630][INFO] [controller_stopper_node-3]: process started with pid [23632][INFO] [ur_ros2_control_node-1]: process started with pid [23628][INFO] [urscript_interface-4]: process started with pid [23634][INFO] [robot_state_publisher-5]: process started with pid [23636][INFO] [rviz2-6]: process started with pid [23638][INFO] [spawner-7]: process started with pid [23640][INFO] [spawner-8]: process started with pid [23642][INFO] [spawner-9]: process started with pid [23644][INFO] [spawner-10]: process started with pid [23646][INFO] [spawner-11]: process started with pid [23656][INFO] [spawner-12]: process started with pid [23658][rviz2-6] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.[controller_stopper_node-3] [INFO] [1697621248.323970889] [Controller stopper]: Waiting for switch controller service to come up on controller_manager/switch_controller[dashboard_client-2] [INFO] [1697621248.332004402] [UR_Client_Library:]: Connected: Universal Robots Dashboard Server[dashboard_client-2] [ur_ros2_control_node-1] [WARN] [1697621248.343058321] [controller_manager]: [Deprecated] Passing the robot description parameter directly to the control_manager node is deprecated. Use '~/robot_description' topic from 'robot_state_publisher' instead.[ur_ros2_control_node-1] text not specified in the tf_prefix tag[ur_ros2_control_node-1] [INFO] [1697621248.343371642] [resource_manager]: Loading hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.346872971] [resource_manager]: Initialize hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.346927862] [resource_manager]: Successful initialization of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697621248.347084371] [resource_manager]: 'configure' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.347091370] [resource_manager]: Successful 'configure' of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697621248.347105751] [resource_manager]: 'activate' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.347110579] [URPositionHardwareInterface]: Starting ...please wait...[ur_ros2_control_node-1] [INFO] [1697621248.347118214] [URPositionHardwareInterface]: Initializing driver...[robot_state_publisher-5] [INFO] [1697621248.350609220] [robot_state_publisher]: Robot initialized[ur_ros2_control_node-1] [WARN] [1697621248.361342137] [UR_Client_Library:]: Your system/user seems not to be setup for FIFO scheduling. We recommend using a lowlatency kernel with FIFO scheduling. See https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/blob/master/ur_robot_driver/doc/real_time.md for details.[rviz2-6] [INFO] [1697621248.626779825] [rviz2]: Stereo is NOT SUPPORTED[rviz2-6] [INFO] [1697621248.627533634] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)[rviz2-6] [INFO] [1697621248.647145156] [rviz2]: Stereo is NOT SUPPORTED[ur_ros2_control_node-1] [INFO] [1697621248.717338678] [UR_Client_Library:]: Negotiated RTDE protocol version to 2.[ur_ros2_control_node-1] [INFO] [1697621248.717439732] [UR_Client_Library:]: Setting up RTDE communication with frequency 125.000000[spawner-8] [INFO] [1697621250.548518465] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697621250.590337892] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697621250.602488770] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697621250.620963765] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697621250.633218873] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697621250.692575016] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[ur_ros2_control_node-1] [WARN] [1697621251.982466542] [UR_Client_Library:]: DEPRECATION NOTICE: Setting the keepalive count has been deprecated. Instead use the RobotReceiveTimeout, to set the timeout directly in the write commands. Please change your code to set the read timeout in the write commands directly. This keepalive count will overwrite the timeout passed to the write functions.[ur_ros2_control_node-1] [WARN] [1697621251.982506841] [UR_Client_Library:]: DEPRECATION NOTICE: Setting the keepalive count has been deprecated. Instead you should set the timeout directly in the write commands. Please change your code to set the read timeout in the write commands directly. This keepalive count will overwrite the timeout passed to the write functions.[ur_ros2_control_node-1] [INFO] [1697621251.982512081] [URPositionHardwareInterface]: Calibration checksum: 'calib_17227329492635474227'.[spawner-8] [INFO] [1697621252.562613654] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697621252.602825499] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697621252.616024085] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697621252.641434793] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697621252.646665080] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697621252.703861342] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[ur_ros2_control_node-1] [INFO] [1697621253.055205580] [URPositionHardwareInterface]: Calibration checked successfully.[ur_ros2_control_node-1] [INFO] [1697621253.055307779] [URPositionHardwareInterface]: System successfully started![ur_ros2_control_node-1] [INFO] [1697621253.055320054] [resource_manager]: Successful 'activate' of hardware 'ur10'[controller_stopper_node-3] [INFO] [1697621253.059460067] [Controller stopper]: Service available[controller_stopper_node-3] [INFO] [1697621253.059488185] [Controller stopper]: Waiting for list controllers service to come up on controller_manager/list_controllers[controller_stopper_node-3] [INFO] [1697621253.059504823] [Controller stopper]: Service available[ur_ros2_control_node-1] [WARN] [1697621253.061565941] [controller_manager]: Could not enable FIFO RT scheduling policy[ur_ros2_control_node-1] [WARN] [1697621253.061735037] [UR_Client_Library:]: Your system/user seems not to be setup for FIFO scheduling. We recommend using a lowlatency kernel with FIFO scheduling. See https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/blob/master/ur_robot_driver/doc/real_time.md for details.[ur_ros2_control_node-1] [INFO] [1697621253.116692126] [controller_manager]: Loading controller 'forward_position_controller'[spawner-12] [INFO] [1697621253.137759710] [spawner_forward_position_controller]: Loaded forward_position_controller[ur_ros2_control_node-1] [INFO] [1697621253.138856325] [controller_manager]: Configuring controller 'forward_position_controller'[ur_ros2_control_node-1] [INFO] [1697621253.139698681] [forward_position_controller]: configure successful[ur_ros2_control_node-1] [INFO] [1697621253.175154503] [controller_manager]: Loading controller 'joint_state_broadcaster'[spawner-8] [INFO] [1697621253.195727700] [spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.197512915] [controller_manager]: Configuring controller 'joint_state_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.197580129] [joint_state_broadcaster]: 'joints' or 'interfaces' parameter is empty. All available state interfaces will be published[spawner-8] [INFO] [1697621253.221031057] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.223622825] [controller_manager]: Loading controller 'speed_scaling_state_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.241050528] [speed_scaling_state_broadcaster]: Loading UR SpeedScalingStateBroadcaster with tf_prefix: [spawner-10] [INFO] [1697621253.250161824] [spawner_speed_scaling_state_broadcaster]: Loaded speed_scaling_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.252239879] [controller_manager]: Loading controller 'force_torque_sensor_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.271881201] [controller_manager]: Loading controller 'scaled_joint_trajectory_controller'[spawner-11] [INFO] [1697621253.272446246] [spawner_force_torque_sensor_broadcaster]: Loaded force_torque_sensor_broadcaster[ur_ros2_control_node-1] [WARN] [1697621253.286567684] [scaled_joint_trajectory_controller]: [Deprecated]: "allow_nonzero_velocity_at_trajectory_end" is set to true. The default behavior will change to false.[ur_ros2_control_node-1] [INFO] [1697621253.288512025] [controller_manager]: Loading controller 'io_and_status_controller'[spawner-7] [INFO] [1697621253.289374662] [spawner_scaled_joint_trajectory_controller]: Loaded scaled_joint_trajectory_controller[INFO] [spawner-12]: process has finished cleanly [pid 23658][ur_ros2_control_node-1] [INFO] [1697621253.305532942] [controller_manager]: Configuring controller 'speed_scaling_state_broadcaster'[spawner-9] [INFO] [1697621253.305770366] [spawner_io_and_status_controller]: Loaded io_and_status_controller[ur_ros2_control_node-1] [INFO] [1697621253.306085776] [speed_scaling_state_broadcaster]: Publisher rate set to : 100.0 Hz[ur_ros2_control_node-1] [INFO] [1697621253.307379689] [controller_manager]: Configuring controller 'force_torque_sensor_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.310337596] [controller_manager]: Configuring controller 'scaled_joint_trajectory_controller'[ur_ros2_control_node-1] [INFO] [1697621253.310459286] [scaled_joint_trajectory_controller]: No specific joint names are used for command interfaces. Using 'joints' parameter.[ur_ros2_control_node-1] [INFO] [1697621253.310483769] [scaled_joint_trajectory_controller]: Command interfaces are [position] and state interfaces are [position velocity].[ur_ros2_control_node-1] [INFO] [1697621253.310501202] [scaled_joint_trajectory_controller]: Using 'splines' interpolation method.[ur_ros2_control_node-1] [INFO] [1697621253.312947419] [scaled_joint_trajectory_controller]: Action status changes will be monitored at 20.00 Hz.[ur_ros2_control_node-1] [INFO] [1697621253.320653317] [controller_manager]: Configuring controller 'io_and_status_controller'[ur_ros2_control_node-1] [INFO] [1697621253.330893201] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-10] [INFO] [1697621253.332065298] [spawner_speed_scaling_state_broadcaster]: Configured and activated speed_scaling_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.346907827] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-11] [INFO] [1697621253.347479372] [spawner_force_torque_sensor_broadcaster]: Configured and activated force_torque_sensor_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.363632046] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-7] [INFO] [1697621253.364074898] [spawner_scaled_joint_trajectory_controller]: Configured and activated scaled_joint_trajectory_controller[ur_ros2_control_node-1] [INFO] [1697621253.364759362] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.364926034] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.364946460] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.371739379] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.384753616] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.385256245] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-9] [INFO] [1697621253.390939616] [spawner_io_and_status_controller]: Configured and activated io_and_status_controller[INFO] [spawner-8]: process has finished cleanly [pid 23642][ur_ros2_control_node-1] [INFO] [1697621253.397749739] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [INFO] [spawner-10]: process has finished cleanly [pid 23646][INFO] [spawner-11]: process has finished cleanly [pid 23656][INFO] [spawner-7]: process has finished cleanly [pid 23640][INFO] [spawner-9]: process has finished cleanly [p效果如下:
点击气泡1里面的箭头,RVIZ和浏览器里面的缩略图都可以正常同步移动。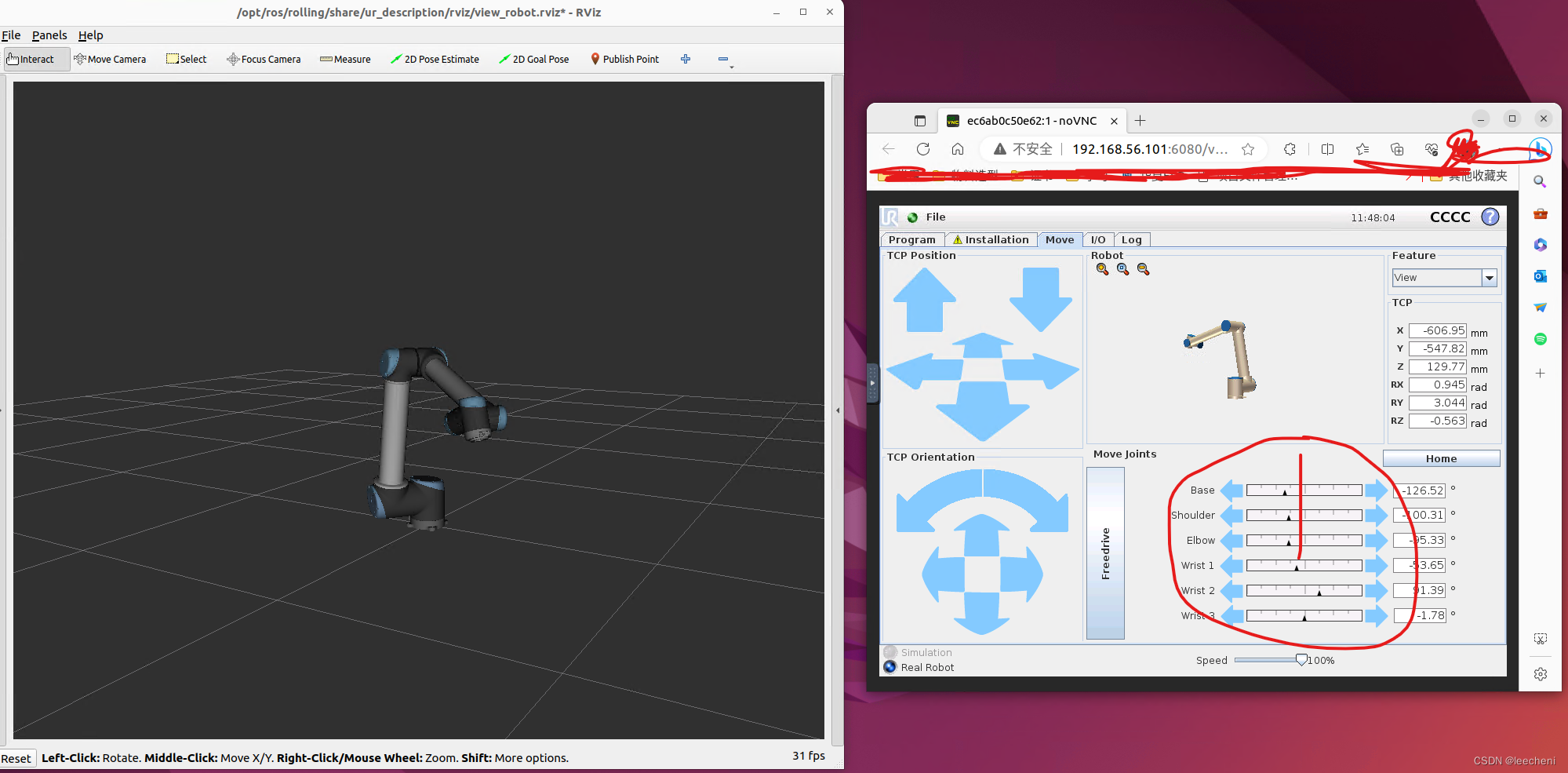
4.总结
看来很多问题还是硬件不行啊,这个强劲的电脑效果不错的。