义乌城市建设规划网站好的建站网站
文章目录
- openpnp - error - 微调mark点坐标后,更新板子其他原件其他坐标报错的变通方法
- 概述
- 想出来一个变通的方法
- END
openpnp - error - 微调mark点坐标后,更新板子其他原件其他坐标报错的变通方法
概述
载入坐标文件后, 指定左下角远点坐标, 然后定位板子上的3个Mark点, 因为左下角只是大概指定, 不太准. 也导致mark点定位后不太准.
微调mark点, 捕捉新位置.
然后用openpnp提供的更新功能, 将其他元件的坐标调整一下, 结果报错.
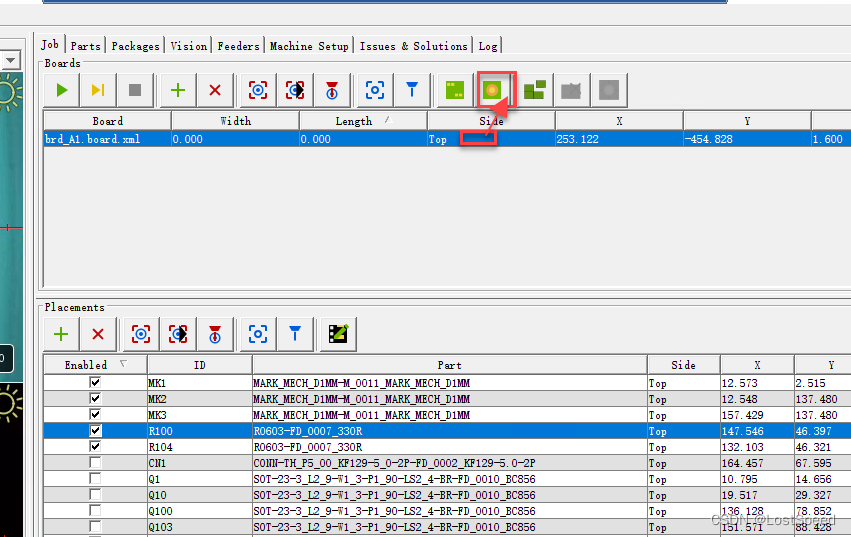
观察更新的现象, 看到顶部相机再做视觉识别…
这明显是openpnnp的bug啊.
就是个坐标么? 3个mark点的坐标微调后, 其他元件坐标, 根据3个mark点的坐标变化, 加减个x/y偏移就行了. 整啥视觉识别啊?..
想出来一个变通的方法
坐标文件是我从allegro中导出来的, 然后自己写的程序, 将allegro格式的坐标文件+BOM文件生成openpnp可用的named CSV坐标文件.
生成的named CSV是极其精准的.
如果板子上元件坐标在openpnp中差一点, 只需要调整openpnp板子工程中左下角的原点坐标, 让板子的坐标整体移动就OK了.
只重新指定板子左下角的原点坐标, 不用openpnp提供的更新其他坐标功能.
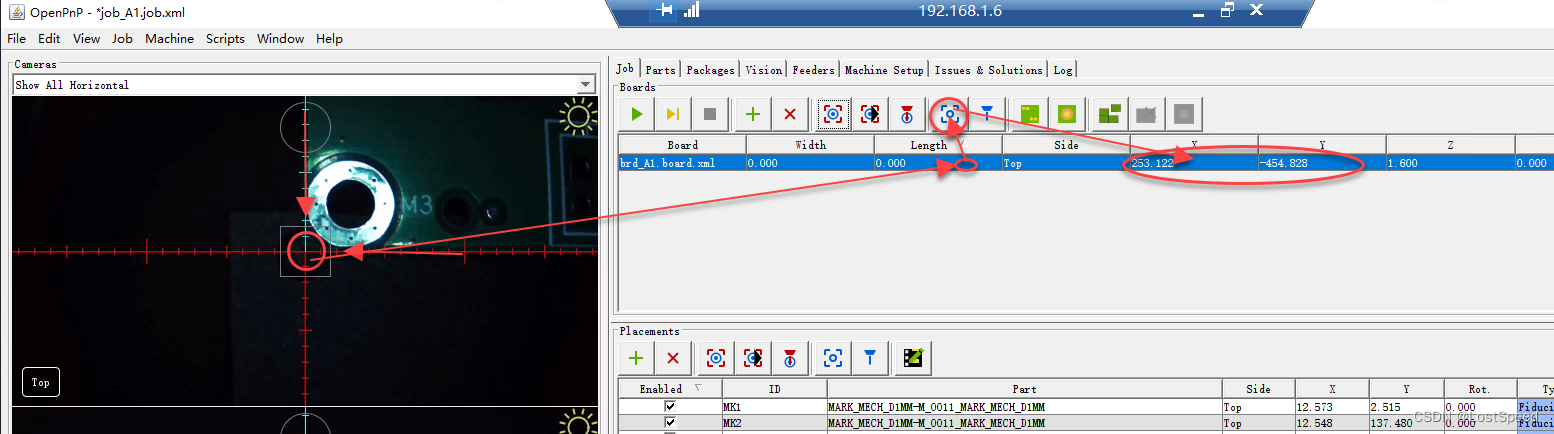
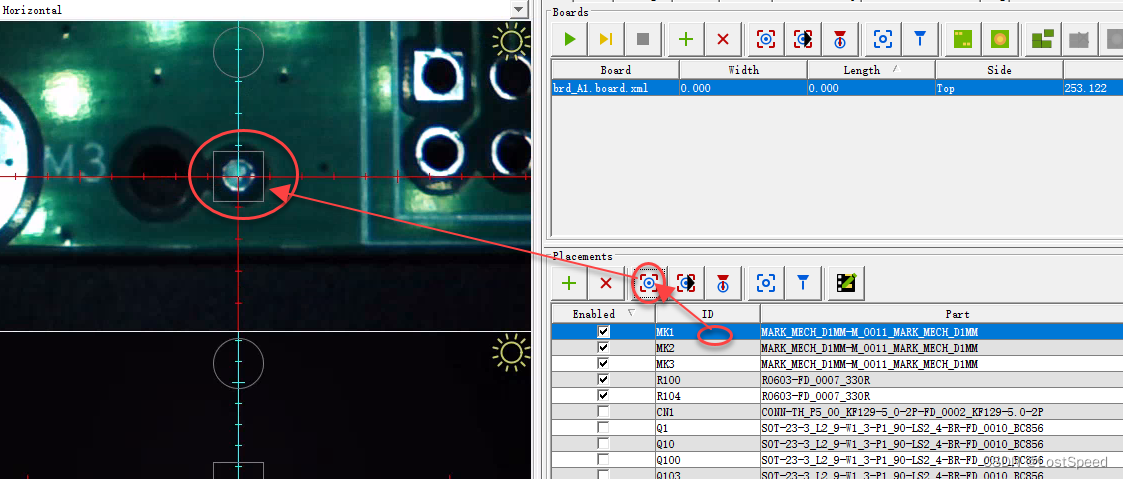
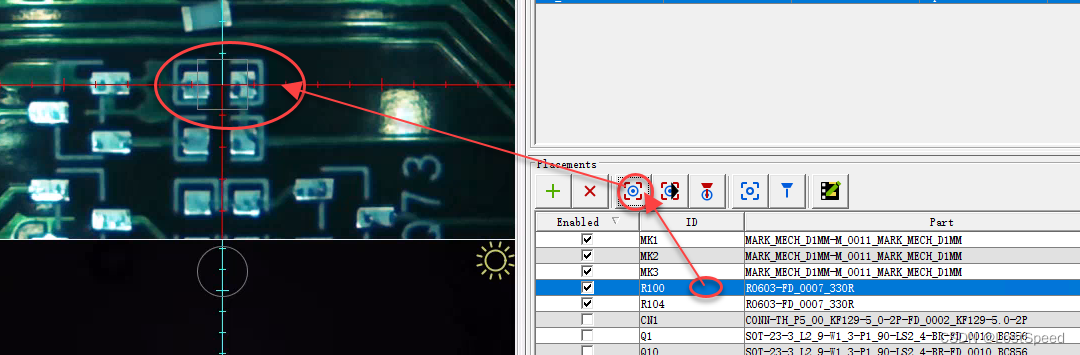
然后用元件浏览功能, 去看板子上的3个mark点坐标和其他元件坐标是否正确. 如果不正确, 就再按照0.1mm的精度, 再次调整板子左下角坐标.
直到用元件浏览功能看到的板子上的元件位置都正确为止.
感觉自己还是很机智的.