百度网址ip西安seo服务
引出问题
关于之前2020年的博客:
01. ESP8266和ROS调试一些问题汇总
02. ESP8266和ESP32配置(需使用ROS1和ROS2)
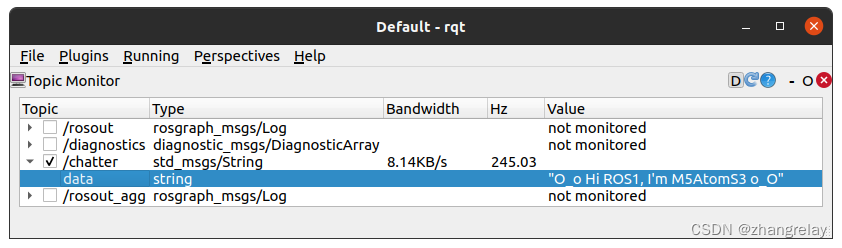
效果展示
使用M5ATOMS3与ROS1(kinetic,melodic,noetic)版本通信比较通用的是rosserial。
有之前基础测试过多次,都没有问题。
版本需求
使用rosserial版本是0.9.1。
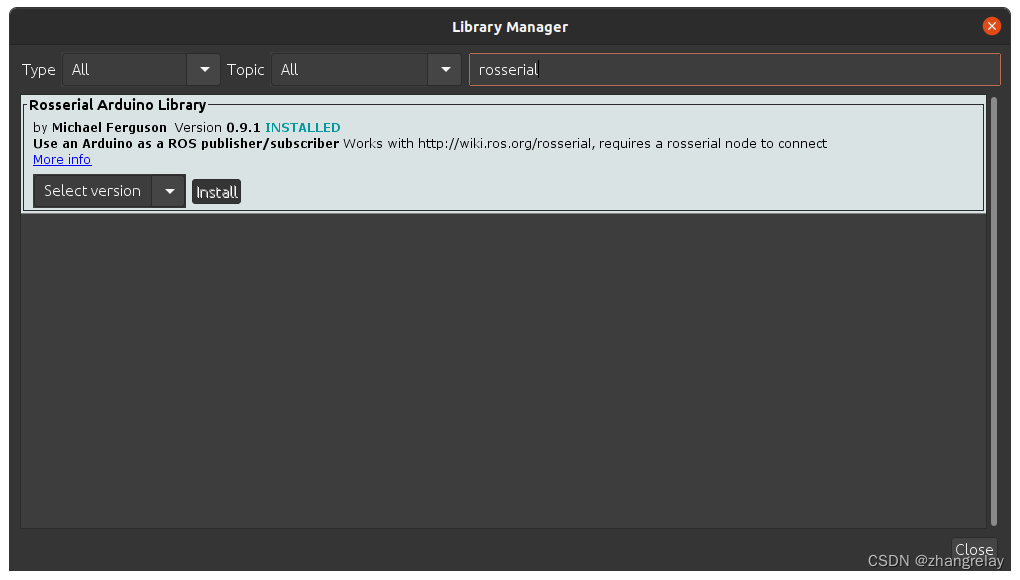
0.7.x版本对ESP32需要修改配置和代码,不推荐。
不合适AI提示
将这个问题仍给AI,得到回复如下(不太可靠):
使用rosserial库在ESP32上与ROS1通信的详细步骤如下:
- 首先,需要在ESP32上安装rosserial库。可以通过Arduino IDE的库管理器搜索并安装rosserial库。
- 打开Arduino IDE,创建一个新的程序。在程序中,需要包含ros.h和ros_arduino.h头文件。
- 在setup函数中,需要初始化ROS节点。这可以通过调用ros::Node::init()函数来实现。
- 要发布ROS消息,需要创建一个ROS话题发布者。可以通过调用ros::Node::get()->advertise函数来创建一个发布者。在这个函数中,需要指定发布的话题名称和发布者频率。
- 在主循环中,需要定义一个回调函数来处理接收到的ROS消息。可以通过调用ros::Node::get()->spinOnce()函数来等待ROS消息。
- 在主循环中,需要设置一个循环速率。在这个函数中,程序会等待一定的时间,然后再次尝试发布ROS消息。
- 要将消息发布到ROS话题上,可以使用发布者的publish函数。在这个函数中,需要创建一个ROS消息对象,并将其数据字段设置为您要发送的消息。
- 最后,在loop函数中,可以空闲等待,以避免Arduino板子停止的问题。
注意:在使用rosserial库与ROS1通信时,需要确保您的ESP32已经连接到了ROS网络中,并且已经配置了正确的的工作节点和话题名称。
以下是一个使用rosserial库在ESP32上与ROS1通信的简单示例代码:
#include <ros.h>
#include <ros_arduino.h> void setup()
{ // 初始化ROS节点 ros::Node::init(); // 创建一个ROS话题发布者 ros::Publisher pub = ros::Node::get()->advertise<std_msgs::String>("chatter", 1000); // 定义一个回调函数来处理接收到的ROS消息 ros::Rate loop_rate(10); while (ros::Node::get()->ok()) { // 发布ROS消息 std_msgs::String msg; msg.data = "Hello, ROS1!"; pub.publish(msg); // 等待下一帧消息 loop_rate.sleep(); }
} void loop()
{ // 空函数,仅用于避免Arduino板子停止的错误
}这个示例代码创建了一个ROS节点,发布一个名为"chatter"的ROS话题,并将一个包含"Hello, ROS1!"消息的字符串发布到该话题上。在循环中,程序会等待10毫秒,然后再次发布消息。在回调函数中,程序会检查ROS节点是否仍然存活,如果存活,则继续发布消息。如果节点已经关闭,则回调函数会退出。在循环函数中,程序会空闲等待,以避免Arduino板子停止的问题。
ESP8266资料
这里,需要给AI一些资料让AI学习,并给出更合适的代码。
ESP8266:
/** rosserial Publisher Example* Prints "hello world!"* This intend to connect to a Wifi Access Point* and a rosserial socket server.* You can launch the rosserial socket server with* roslaunch rosserial_server socket.launch* The default port is 11411**/
#include <ESP8266WiFi.h>
#include <ros.h>
#include <std_msgs/String.h>const char* ssid = "your-ssid";
const char* password = "your-password";
// Set the rosserial socket server IP address
IPAddress server(192,168,1,1);
// Set the rosserial socket server port
const uint16_t serverPort = 11411;ros::NodeHandle nh;
// Make a chatter publisher
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);// Be polite and say hello
char hello[13] = "hello world!";void setup()
{// Use ESP8266 serial to monitor the processSerial.begin(115200);Serial.println();Serial.print("Connecting to ");Serial.println(ssid);// Connect the ESP8266 the the wifi APWiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}Serial.println("");Serial.println("WiFi connected");Serial.println("IP address: ");Serial.println(WiFi.localIP());// Set the connection to rosserial socket servernh.getHardware()->setConnection(server, serverPort);nh.initNode();// Another way to get IPSerial.print("IP = ");Serial.println(nh.getHardware()->getLocalIP());// Start to be politenh.advertise(chatter);
}void loop()
{if (nh.connected()) {Serial.println("Connected");// Say hellostr_msg.data = hello;chatter.publish( &str_msg );} else {Serial.println("Not Connected");}nh.spinOnce();// Loop exproximativly at 1Hzdelay(1000);
}AI学习ESP8266
这是一段使用ESP8266芯片和ROS库的代码,它连接到一个WiFi接入点,并发布"hello world!"消息到ROS网络中的"chatter"话题。代码的主要功能如下:
- 包含必要的库文件:ESP8266WiFi库用于连接WiFi,ros库用于ROS通信,std_msgs库用于定义消息类型。
- 定义一些常量:WiFi的SSID和密码, Rosserial服务器的IP地址和端口号,发布消息的内容。
- 在setup函数中,初始化串口通信并开始连接WiFi。在连接成功后,打印出WiFi的IP地址,并设置与Roserial服务器的连接。
- 在loop函数中,检查是否已连接到Roserial服务器。如果已连接,则发布"hello world!"消息到"chatter"话题。如果没有连接,则打印"Not Connected"。
- 使用nh.spinOnce()来处理任何未处理的ROS消息,并使用delay(1000)使循环大约以1Hz的速度运行。
总的来说,这段代码是一个简单的例子,展示了如何使用ESP8266连接到WiFi网络,并与ROS进行通信。
AI给出ESP32示例
然后,接着提问:
请用esp32替换esp8266并给出代码
#include <WiFi.h>
#include <ros.h>
#include <std_msgs/String.h> const char* ssid = "your-ssid";
const char* password = "your-password";
// Set the rosserial socket server IP address
IPAddress server(192,168,1,1);
// Set the rosserial socket server port
const uint16_t serverPort = 11411; ros::NodeHandle nh;
// Make a chatter publisher
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg); // Be polite and say hello
char hello[13] = "hello world!"; void setup()
{ // Use ESP32 serial to monitor the process Serial.begin(115200); Serial.println(); Serial.print("Connecting to "); Serial.println(ssid); // Connect the ESP32 to the wifi AP WiFi.begin(ssid, password); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.println("WiFi connected"); Serial.println("IP address: "); Serial.println(WiFi.localIP()); // Set the connection to rosserial socket server nh.getHardware()->setConnection(server, serverPort); nh.initNode(); // Another way to get IP Serial.print("IP = "); Serial.println(nh.getHardware()->getLocalIP()); // Start to be polite nh.advertise(chatter);
} void loop()
{ if (nh.connected()) { Serial.println("Connected"); // Say hello str_msg.data = hello; chatter.publish( &str_msg ); } else { Serial.println("Not Connected"); } nh.spinOnce(); // Loop exproximativly at 1Hz delay(1000);
}请注意,ESP32和ESP8266在一些方面有所不同,因此代码需要进行一些修改以使其适用于ESP32。在上面的代码中,仅更换了库文件和某些函数调用,其他部分保持不变。
字符串改为浮点数示例
这段代码使用的是std_msgs/String.h头文件发布字符串消息,如果要发布一个浮点数应该如何修改代码?
要发布一个浮点数消息,需要使用std_msgs/Float64.h头文件,并相应地修改代码中的消息类型。以下是一个示例修改后的代码:
#include <WiFi.h>
#include <ros.h>
#include <std_msgs/Float64.h> // 替换为浮点数消息类型 const char* ssid = "your-ssid";
const char* password = "your-password";
// Set the rosserial socket server IP address
IPAddress server(192,168,1,1);
// Set the rosserial socket server port
const uint16_t serverPort = 11411; ros::NodeHandle nh;
// Make a chatter publisher for float messages
std_msgs::Float64 float_msg; // 定义浮点数消息对象
ros::Publisher float_pub("float_topic", &float_msg); // 创建浮点数消息发布者 // Be polite and say hello
float float_value = 3.14; // 定义浮点数值 void setup()
{ // Use ESP32 serial to monitor the process Serial.begin(115200); Serial.println(); Serial.print("Connecting to "); Serial.println(ssid); // Connect the ESP32 to the wifi AP WiFi.begin(ssid, password); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.println("WiFi connected"); Serial.println("IP address: "); Serial.println(WiFi.localIP()); // Set the connection to rosserial socket server nh.getHardware()->setConnection(server, serverPort); nh.initNode(); // Start to be polite float_msg.data = float_value; // 设置浮点数值 float_pub.publish(&float_msg); // 发布浮点数消息
} void loop()
{ if (nh.connected()) { Serial.println("Connected"); } else { Serial.println("Not Connected"); } nh.spinOnce(); // Loop exproximativly at 1Hz delay(1000);
}这段代码是一个使用ESP32和ROS1进行通信的示例程序。下面是代码的详细分析:
-
引入必要的库文件:
WiFi.h:用于连接WiFi网络。ros.h:用于与ROS1系统进行通信。std_msgs/Float64.h:用于定义浮点数消息类型。
-
定义常量:
ssid:WiFi网络的SSID。password:WiFi网络的密码。server:ROS1 rosserial服务器的IP地址。serverPort:ROS1 rosserial服务器的端口号。
-
创建ROS节点句柄(NodeHandle):
nh:ROS1节点的句柄,用于与ROS1系统进行通信。
-
定义浮点数消息对象:
float_msg:用于存储浮点数消息的数据。
-
创建浮点数消息发布者:
float_pub:用于发布浮点数消息到ROS1网络中的指定话题。
-
定义浮点数值:
float_value:一个初始值为3.14的浮点数。
-
setup函数:- 初始化串口通信,设置波特率为115200。
- 开始连接WiFi网络。
- 循环检查连接状态,直到连接成功。
- 打印连接成功信息,并显示ESP32的IP地址。
- 设置与ROS1 rosserial服务器的连接。
- 初始化ROS节点。
- 设置浮点数值,并发布浮点数消息到指定的话题。
-
loop函数:- 检查ROS节点是否连接成功。
- 如果连接成功,则打印"Connected",否则打印"Not Connected"。
- 调用ROS节点的
spinOnce函数,处理ROS消息。 - 延迟1秒,以实现大约1Hz的循环。
总体来说,这段代码的功能是将ESP32开发板连接到WiFi网络,并与ROS1系统进行通信。它使用WiFi模块进行网络连接,使用ROS1库进行消息发布和订阅。通过修改和定义适当的数据类型,可以发布和接收浮点数消息。
在这个示例中,我们使用了std_msgs/Float64.h头文件来定义浮点数消息类型,并创建了一个名为float_msg的浮点数消息对象。然后,我们创建了一个名为float_pub的发布者,用于发布浮点数消息到指定的话题上。在setup函数中,我们设置了浮点数值,并将其发布到ROS网络中。在loop函数中,我们检查是否已连接到Roserial服务器,并使用nh.spinOnce()来处理任何未处理的ROS消息。
在与ESP32和ROS1进行通信时,需要注意以下几点:
- 硬件设置:确保ESP32开发板与计算机之间通过合适的接口进行连接,如USB口或串口。同时,确保ESP32开发板的固件烧录正确,并且已经连接到了ROS1网络中。
- 通信协议选择:ROS1支持多种通信协议,如ROS消息、ROS服务、ROS话题等。根据实际需求,选择适合的通信协议进行通信。
- 消息类型定义:在使用ROS消息进行通信时,需要定义消息的数据类型。确保ESP32和ROS1中的消息类型匹配,否则可能会导致通信失败。
- 发布者与订阅者:在ROS1中,发布者用于发布消息,订阅者用于接收消息。ESP32既可以是消息的发布者,也可以是消息的订阅者。根据实际需求,选择适当的的方式进行通信。
- ROS话题:ROS话题是一种基于发布/订阅模式的通信协议。ESP32可以发布或订阅特定的话题,以便与其他节点进行通信。确保ESP32和ROS1中的话题名称匹配,以确保正确的通信。
- ROS服务:ROS服务提供了一种请求/响应式的通信方式。ESP32可以作为服务的提供者,提供某种服务,也可以作为服务请求者,请求其他节点的服务。在使用ROS服务进行通信时,需要确保服务名称和请求的数据类型匹配。
- 网络安全:在进行ROS1通信时,需要注意网络安全问题。ESP32开发板可能会暴露在互联网上,因此需要进行适当的安全设置和保护。
综上所述,与ESP32和ROS1进行通信需要确保硬件连接正确、通信协议选择合适、消息类型定义正确、发布者与订阅者设置正确、ROS话题和服务使用正确,同时注意网络安全问题。