找一家秦皇岛市做网站的公司商丘网站seo
文章目录
- (十一) 常用数据结构
- 1.动态数组
- (1)模型
- (2).h与.c
- (3)实现
- 2.链表
- (1)模型
- (2)分类
- (3)基本操作(API)
- (4)实现
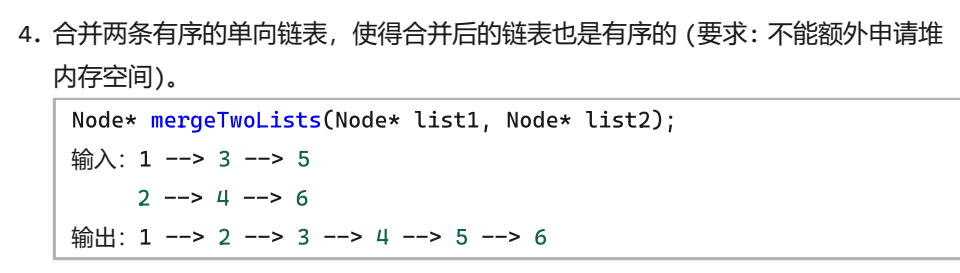
- (5)链表常见面试题
- (6)空间与时间
- 3.栈
- (1)模型
- (2)基本操作
- (3)实现
- (4)栈的应用
- 4.队列
- (1)模型
- (2)基本操作(API)
- (3)实现
- (4)队列的应用
- 5.哈希表
- (1)哈希表的提出原因
- (2)哈希表的模型
- (3)哈希表的基本操作
- (4)哈希表的理论设计:哈希函数、哈希桶
- (5)哈希表的具体实现 :拉链法
- (6)性能分析
- (7)哈希表的应用:存储键值对数据
- 6.位图
- (1)模型
- (2)基本操作
- (3)实现
- (4)位图的应用
- 7.二叉树
- (1)定义
- (2)二叉树的特殊形态
- (3)二叉搜索树BST的实现
- (0)结构体定义
- ①创建:create
- ②增加:BST的插入 insert
- ③查找:BST的查找 search
- ④删除:BST的删除 delete
- ⑥遍历
- 1)深度优先遍历:递归,需要函数调用栈
- i.前序遍历
- ii.中序遍历
- iii.后序遍历
- 2)广度优先遍历:
- iv.层序遍历(层次遍历):需要队列,需要手动创建
- ⑦销毁:destroy
- (4)BST性能分析
- (5)平衡二叉搜索树
- ①AVL树
- ②红黑树 RBT
- (5)B树
- ①2-3-4树 (四阶B树)
- (6)二叉搜索树的应用
- (7)代码缩进的层次越高,代码的复杂度就越高,可读性越差
- (十二) 排序和二分查找
- 1.二分查找
- 4.实现:2种实现 + 4种变式
- 2.排序算法分析
- 3.选择排序
- 4.冒泡排序
- 5.插入排序
- 6.希尔排序
- 7.归并排序
- (1)分治思想
- (2)合并操作:Merge()
- 8.快速排序
- 9.堆排序
- 10.如何设计一个通用的排序算法
(十一) 常用数据结构
学习数据结构:①模型 ②API ③实现、时间复杂度 ④应用
基础:动态数组、链表
其他数据结构:栈、队列、哈希表、位图、二叉树
算法:排序、二分查找
1.动态数组
(1)模型
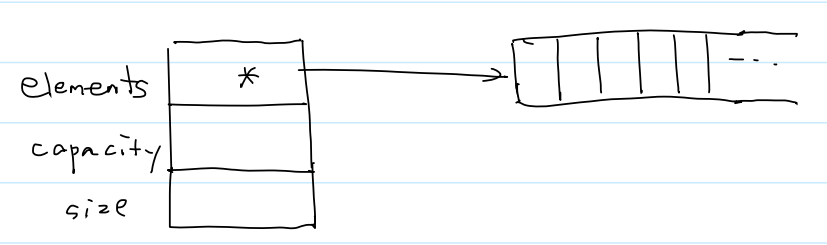
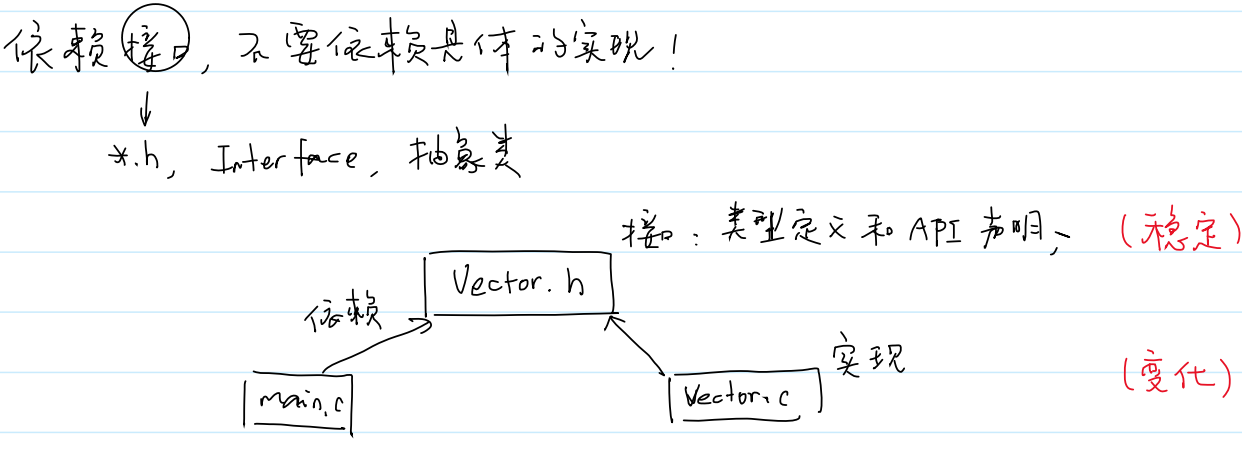
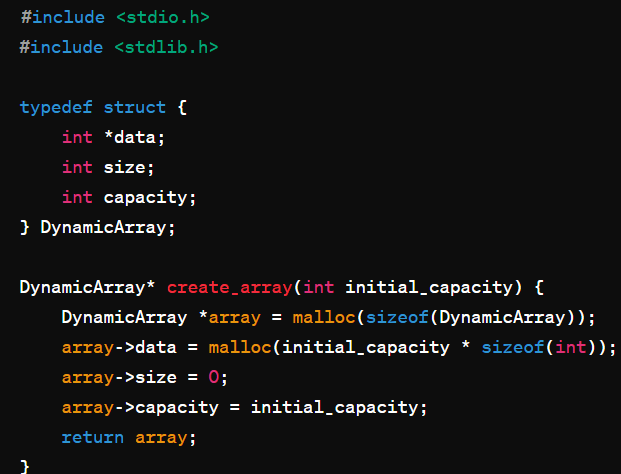
(2).h与.c
(3)实现
2.链表
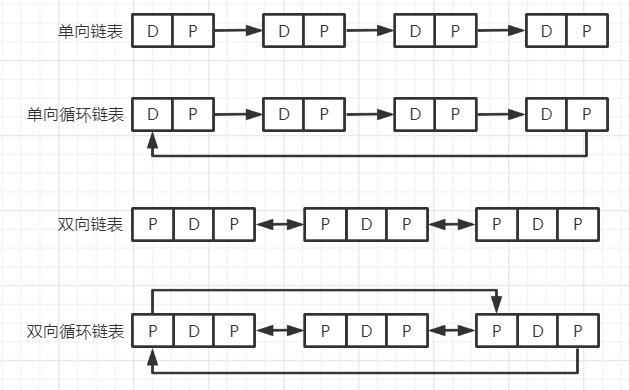
(1)模型
1.单链表
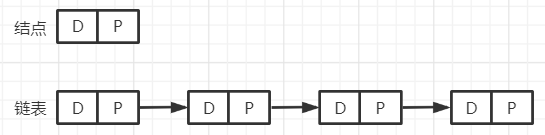
2.双链表

(2)分类
(3)基本操作(API)
1.单链表的基本操作
(1)增加:已知某个结点的指针,在该结点的后面添加新结点:时间复杂度O(1)
(2)删除:已知某个结点的指针,删除该结点后面的结点:时间复杂度O(1)
(3)查找:
①按位查找,根据索引查找结点,时间复杂度O(n)
②按值查找,查找与特定值相等的结点:元素大小无序、元素大小有序,都是O(n)
2.双链表的基本操作
(1)增加
(2)删除
(3)查找
①根据索引查找值
②查找与特定值相等的结点
③查找前驱结点
(4)遍历
①正向遍历
②逆向遍历
(4)实现
(1)结点、单链表定义
typedef struct node{ //结点int data;struct node* next;
} Node;typedef struct { //单链表Node* head;Node* tail;int size;
} List;
(2)析构函数
void node_destroy(Node* head) {Node* cur = head;while (cur != NULL) {Node* next = cur->next;free(cur);cur = next;}
}
(5)链表常见面试题
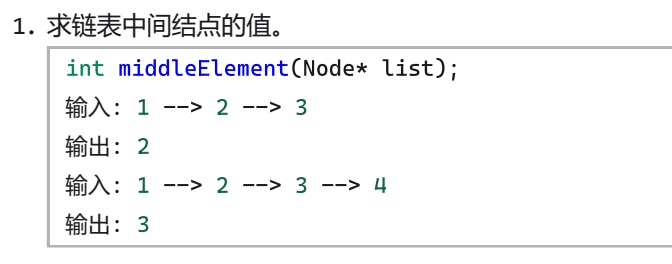
思路1:先遍历一遍,得到链表长度。再遍历第二次,找到中间节点。
时间O(n),空间O(1)
思路2:快慢指针,fast一次走两步,slow一次走一步
时间O(n),空间O(1)
fast == NULL || fast->next == NULL //判断fast到达末尾,短路原则
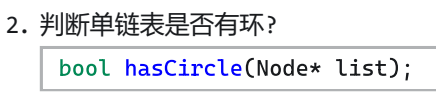
思路1:
用数组保存已遍历过的结点指针
时间:遍历O(n)×查找效率
查找效率:哈希表O(1),链表O(n)
思路2:快慢指针
如果无环,则fast先一定先到终点(变为NULL),slow到中点
如果有环,fast与slow一定会在环中相遇
时间O(n)
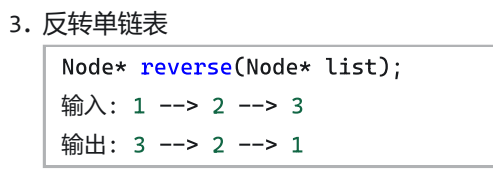
思路1:头插法
思路2:递归
边界条件:head == NULL || head->next == NULL
递归公式:每次只反转第一个结点,假设后n-1个已经反转好了(实际并没有)
时间O(n),空间O(n),栈的深度
dummy node:哑结点(虚拟头结点,不存数据,仅为了方便结点的插入)
(6)空间与时间
①空间换时间:缓存、缓冲
②时间换空间:压缩、交换区(对换区)
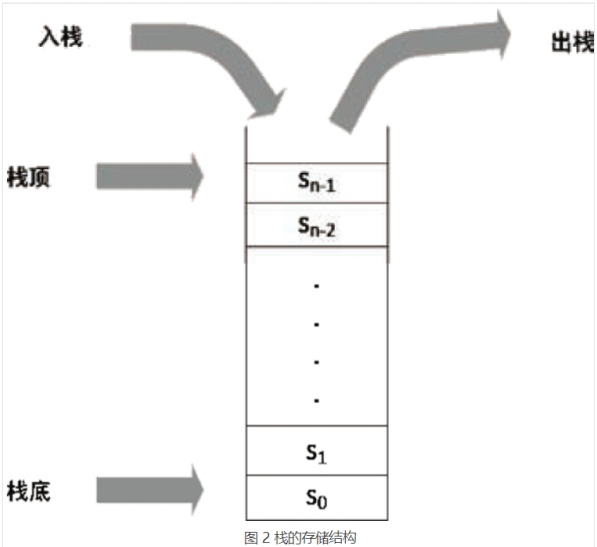
3.栈
(1)模型
栈是操作受限的线性表,只能在同一端添加和删除元素。
能添加的一端称为栈顶(top),不能添加删除的一端称为栈底(bottom)。
特性:FILO,LIFO
Q:为什么需要栈这种数据结构?数组和链表这种线性表不是都能实现吗?
A:①安全 ②可读性强 ③和现实生活中的场景有对应
(2)基本操作
①添加:入栈 Push
②删除:出栈 Pop
③查找:查栈顶 Peek
④判空:Empty
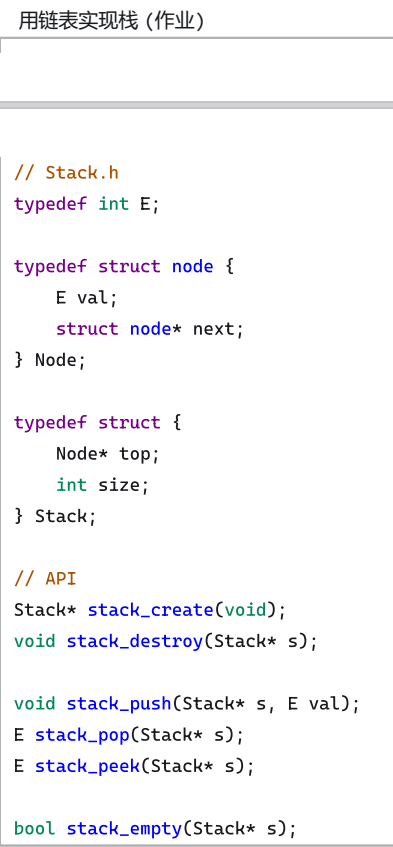
(3)实现
用链表实现链栈
(1)构造函数
Stack* stack_create(void) {return calloc(1, sizeof(Stack));
}
(2)析构函数
void stack_destroy(Stack* s) {Node* curr = s->top;while (curr != NULL) {Node* next = curr->next;free(curr);curr = next;}free(s);
}
(3)入栈
void stack_push(Stack* s, E val) {Node* push = calloc(1,sizeof(Node));if (push == NULL) {printf("Error: push failed because calloc failed.\n");exit(1);}push->next = s->top;push->data = val;s->top= push;s->size++;
}
(4)出栈
E stack_pop(Stack* s) {if (stack_empty(s)) {printf("Error: stack is empty, pop failed.\n");exit(1);}Node* remove = s->top;s->top = s->top->next;int ret_value = remove->data;free(remove);s->size--;return ret_value;
}
(5)查找栈顶元素
E stack_peek(Stack* s) {if (stack_empty(s)) {printf("Error: peek failed because the stack is empty.\n");exit(1);}return s->top->data;
}
(6)判空
bool stack_empty(Stack* s) {return s->size == 0;
}
(7)完整代码
//stack.h
#include <stdbool.h>
typedef int E;typedef struct node {E data;struct node* next;
} Node;typedef struct {Node* top;int size;
} Stack;// API
Stack* stack_create(void);
void stack_destroy(Stack* s);void stack_push(Stack* s, E val);
E stack_pop(Stack* s);
E stack_peek(Stack* s);bool stack_empty(Stack* s);
//stack.c
#include "stack.h"
#include <stdlib.h>
#include <stdio.h>Stack* stack_create(void) {return calloc(1, sizeof(Stack));
}void stack_destroy(Stack* s) {Node* curr = s->top;while (curr != NULL) {Node* next = curr->next;free(curr);curr = next;}free(s);
}void stack_push(Stack* s, E val) {Node* push = calloc(1,sizeof(Node));if (push == NULL) {printf("Error: push failed because calloc failed.\n");exit(1);}push->next = s->top;push->data = val;s->top= push;s->size++;
}E stack_pop(Stack* s) {if (stack_empty(s)) {printf("Error: stack is empty, pop failed.\n");exit(1);}Node* remove = s->top;s->top = s->top->next;int ret_value = remove->data;free(remove);s->size--;return ret_value;
}E stack_peek(Stack* s) {if (stack_empty(s)) {printf("Error: peek failed because the stack is empty.\n");exit(1);}return s->top->data;
}bool stack_empty(Stack* s) {return s->size == 0;
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "stack.h"
#include <stdio.h>int main(void) {Stack* s = stack_create();stack_push(s,1);stack_push(s,2);stack_push(s,3);stack_push(s,4);stack_destroy(s);return 0;
}
(4)栈的应用
特性:后进先出 LIFO
(1)函数调用栈
(2)符号匹配问题
(3)用单调栈表示优先级:表达式求值
(4)用栈来记录轨迹:
①递归
②网页的前进后退(前进栈、后退栈)
③深度优先搜索(DFS)
④回溯算法
⑤树的前中后序遍历
(5)进制转换
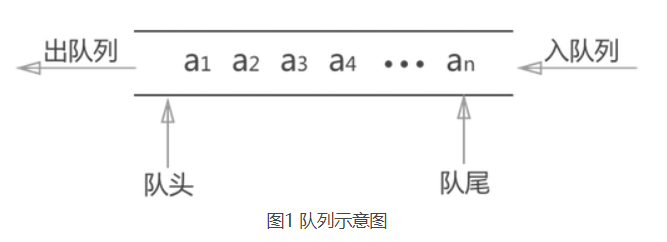
4.队列
(1)模型
队列是操作受限的线性表,一端添加元素,另一端删除元素
队尾(rear)添加元素,队头(front)删除元素
特性:FIFO,先进先出 (公平)
(2)基本操作(API)
①添加:入队列(queue_push)
②删除:出队列(queue_pop)
③查找:查看队头元素(queue_peek)
④判空:queue_empty
⑤判满:queue_full
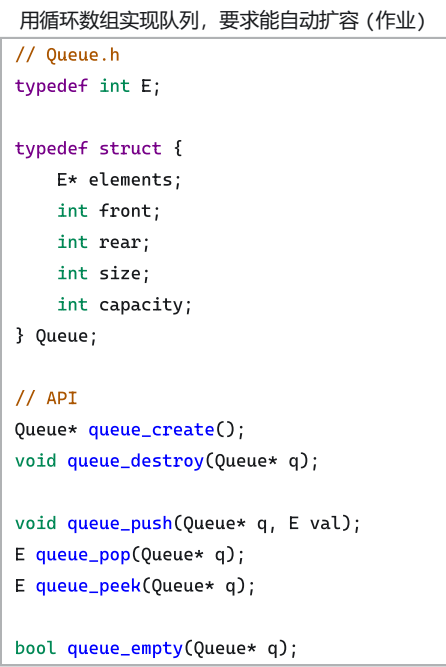
(3)实现
(1)循环数组:用动态数组实现 顺序队列
(2)链表
a.只用rear标识队尾。缺点:出队 O(n)
b.front标识队头,rear标识队尾。缺点:极大浪费内存空间,否则需要大量移动元素
c.“循环”数组,实现循环队列。缺点:判空判满时都是 rear == front
d.①牺牲一个存储单元,有一个空间不存元素,认为已满,(rear+1)%capacity == front ②添加属性size,判空size == 0,判满size == capacity
if(rear == capacity){grow_capacity();
}
elements[rear] = val;
rear = (rear + 1)%capacity;
(1)构造函数
Queue* queue_create() {Queue* queue = calloc(1, sizeof(Queue));queue->elements = calloc(DEFAULT_SIZE, sizeof(E));queue->capacity = DEFAULT_SIZE;return queue;
}
(2)析构函数
void queue_destroy(Queue* q) {free(q->elements); //释放的是手动malloc的内容free(q);
}
(3)入队
void queue_push(Queue* q, E val) {if (q->size == q->capacity) {grow_capacity(q); //自动扩容}q->elements[q->rear] = val;q->rear = (q->rear + 1) % q->capacity;q->size++;
}
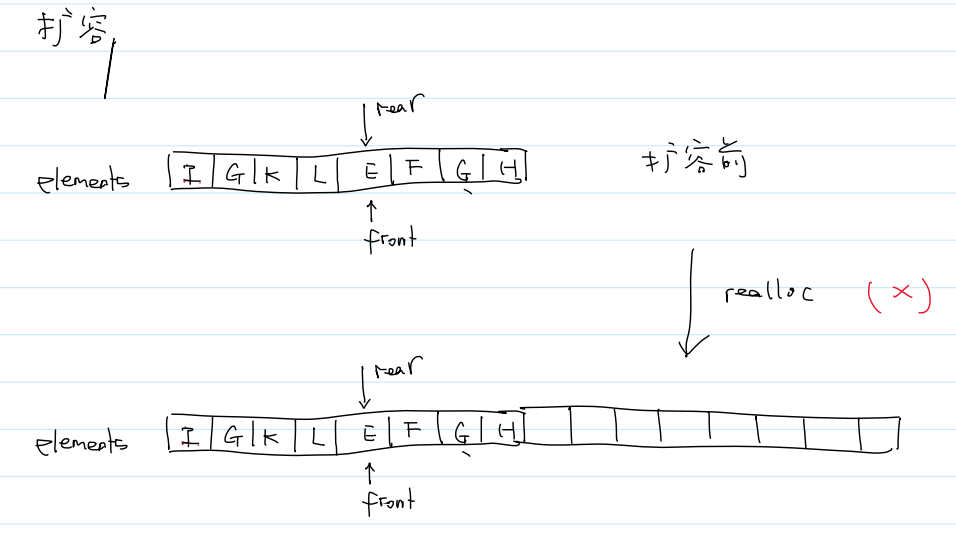
(4)自动扩容
//自动扩容
void grow_capacity(Queue* q) {if (q->size >= MAX_SIZE) {printf("Error: push failed, because queue size has reached MAX_SIZE.\n");printf("size = %d, capacity = %d, MAX_SIZE = %d\n", q->size, q->capacity, MAX_SIZE);exit(-1);}int new_capacity = (q->capacity << 1) < MAX_SIZE ? (q->capacity << 1) : MAX_SIZE;E* new_arr = calloc(new_capacity, sizeof(E));if (!new_arr) {printf("calloc failed of new_arr in grow_capacity.\n");exit(-1);}for (int i = 0; i < q->size; i++) {new_arr[i] = q->elements[q->front];q->front = (q->front + 1) % q->capacity;}E* temp = q->elements;free(temp);q->elements = new_arr;q->front = 0;q->rear = q->size; //下一个要插入元素的位置,目前为空q->capacity = new_capacity;
}
自动扩容原理
(5)出队
E queue_pop(Queue* q) {if (queue_empty(q)) {printf("Error: pop failed, because queue is empty.\n");exit(-1);}int ret_val = q->elements[q->front];q->front = (q->front + 1) % q->capacity;q->size--;return ret_val;
}
(6)查找队头元素
E queue_peek(Queue* q) {if (queue_empty(q)) {printf("Error: peek failed, because queue is empty.\n");exit(-1);}return q->elements[q->front];
}
(7)队列判空
bool queue_empty(Queue* q) {return q->size == 0;
}
(8)完整代码
//queue.h
#include <stdbool.h>typedef int E;typedef struct {E* elements;int front;int rear;int size; //实际大小int capacity; //容量
} Queue;// API
Queue* queue_create();
void queue_destroy(Queue* q);void queue_push(Queue* q, E val);
E queue_pop(Queue* q);
E queue_peek(Queue* q);bool queue_empty(Queue* q);
//queue.c
#include "queue.h"
#include <stdlib.h>
#include <stdio.h>
#define MAX_SIZE 100
#define DEFAULT_SIZE 10Queue* queue_create() {Queue* queue = calloc(1, sizeof(Queue));queue->elements = calloc(DEFAULT_SIZE, sizeof(E));queue->capacity = DEFAULT_SIZE;return queue;
}void queue_destroy(Queue* q) {free(q->elements); //释放的是手动malloc的内容free(q);
}//自动扩容
void grow_capacity(Queue* q) {if (q->size >= MAX_SIZE) {printf("Error: push failed, because queue size has reached MAX_SIZE.\n");printf("size = %d, capacity = %d, MAX_SIZE = %d\n", q->size, q->capacity, MAX_SIZE);exit(-1);}int new_capacity = (q->capacity << 1) < MAX_SIZE ? (q->capacity << 1) : MAX_SIZE;E* new_arr = calloc(new_capacity, sizeof(E));if (!new_arr) {printf("calloc failed of new_arr in grow_capacity.\n");exit(-1);}for (int i = 0; i < q->size; i++) {new_arr[i] = q->elements[q->front];q->front = (q->front + 1) % q->capacity;}E* temp = q->elements;free(temp);q->elements = new_arr;q->front = 0;q->rear = q->size; //下一个要插入元素的位置,目前为空q->capacity = new_capacity;
}void queue_push(Queue* q, E val) {if (q->size == q->capacity) {grow_capacity(q); //自动扩容}q->elements[q->rear] = val;q->rear = (q->rear + 1) % q->capacity;q->size++;
}E queue_pop(Queue* q) {if (queue_empty(q)) {printf("Error: pop failed, because queue is empty.\n");exit(-1);}int ret_val = q->elements[q->front];q->front = (q->front + 1) % q->capacity;q->size--;return ret_val;
}E queue_peek(Queue* q) {if (queue_empty(q)) {printf("Error: peek failed, because queue is empty.\n");exit(-1);}return q->elements[q->front];
}bool queue_empty(Queue* q) {return q->size == 0;
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "queue.h"//单元测试
int main(void) {Queue* q = queue_create();queue_push(q, 1);queue_push(q, 2);queue_push(q, 3);queue_push(q, 4);return 0;
}
(4)队列的应用
(1)缓冲:①打印缓冲区 ②秒杀队列(有界队列) ③消息队列 (中间件) (协调分布式)
(2)广度优先搜索 BFS:社交软件三度好友、树的层次遍历
5.哈希表
(1)哈希表的提出原因
(1)用数组表示键值对,限制:
①键的取值范围很小
②键可以很容易地转换成数组的下标
(2)若不满足上述两个限制条件,则引入了哈希表来表示 key-value数据
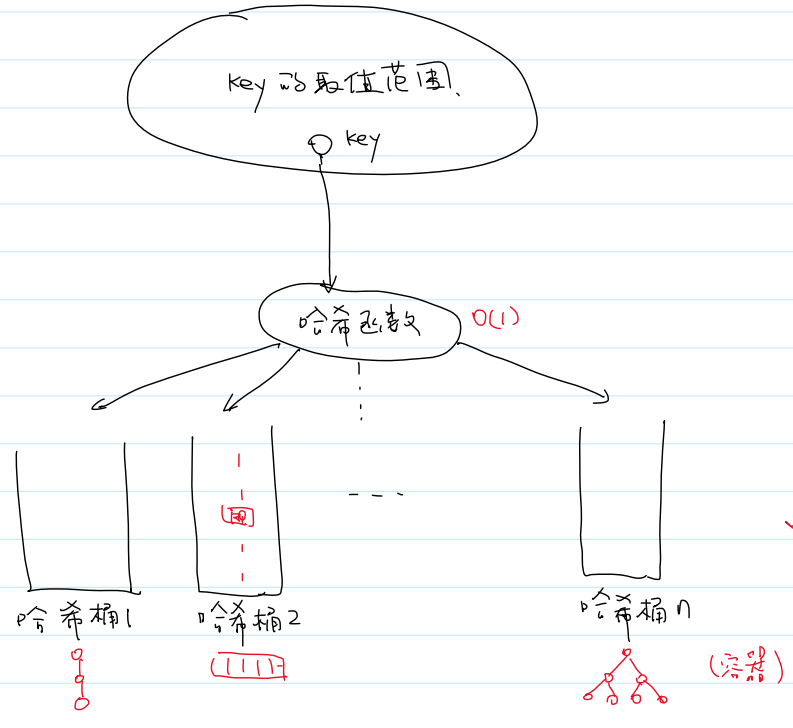
(2)哈希表的模型
①key的取值范围
②哈希函数:时间复杂度O(1)
③哈希桶
(同一个哈希表,可以用不同数据结构的哈希桶:链表、数组、红黑树)
(3)哈希表的基本操作
(1)增加:put(key,val),给一个key,通过哈希函数,添加到对应的哈希桶中
(2)删除:delete(key),根据key来删除键值对
(3)查找:val = get(key)
(4)遍历:依次遍历每一个哈希桶
(4)哈希表的理论设计:哈希函数、哈希桶
(1)哈希函数
哈希函数作为数据的指纹
性能非常好的哈希函数的性质:
①速度快 :O(1)
②哈希值(键值)尽量平均分布
③哈希碰撞的概率非常低 (哈希值→指纹)
④对数据非常敏感
⑤逆向非常困难:不能通过hash值→data,只能data→hash值
哈希函数就是在模仿等概率随机事件
(2)哈希桶:处理哈希冲突,是一种“逻辑结构”
①开放地址法:
i.线性探测法
ii.平方探测法
iii.再散列法 (多个哈希函数,冲突了就用下一个哈希函数)
查找跳转链接:https://blog.csdn.net/Edward1027/article/details/131129113
②拉链法:
拉链法的实现
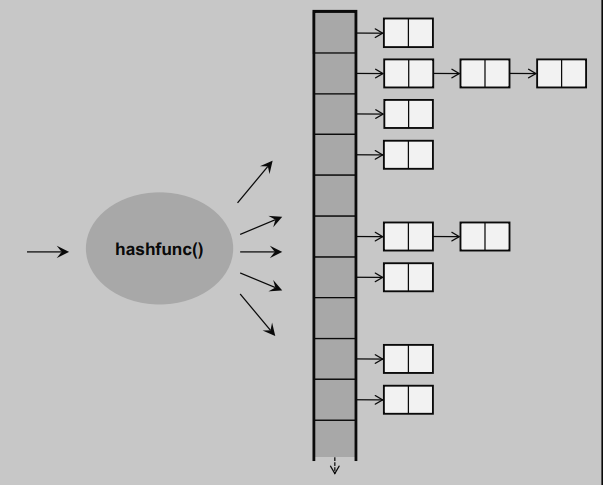
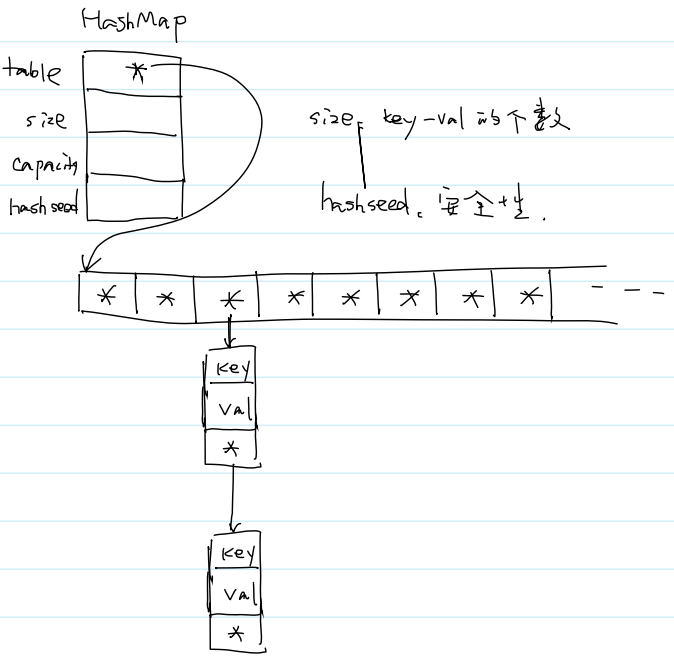
table里存放的是指针。若为NULL则下方无链表,若不为NULL,则为链表的起始地址,即链表头结点的地址。
当结点去掉value,只有key时,哈希表就从存储键值对变成了只存key,即集合
(5)哈希表的具体实现 :拉链法
(1)构造 create
HashMap* hashmap_create(void) {HashMap* map = malloc(sizeof(HashMap));map->table = calloc(DEFAULT_CAPACITY, sizeof(Node*));map->size = 0;map->capacity = DEFAULT_CAPACITY;map->hashseed = time(NULL);return map;
}
(2)析构 destroy
void hashmap_destroy(HashMap* map) {//1.释放所有的结点(遍历哈希表)for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i];while (curr) {Node* next = curr->next;free(curr);curr = next;} // curr == NULL}//2.释放动态数组free(map->table);//3.释放HashMap结构体free(map);
}
(3)增加 put
// 如果key不存在:则添加(key, val)。如果key存在,更新key关联的值,并返回原来关联的值。
//put:返回旧值,若是新结点则返回NULL
V hashmap_put(HashMap* map, K key, V val) {//对key进行哈希,判断key在哪个哈希桶中(哪一条链表中)int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//b.更新key关联的值,并返回原来的值V oldval = curr->val;curr->val = val;return oldval;}curr = curr->next;}//a.添加一个结点保存键值对 key-val,并返回NULL//判断扩容:如果达到负载因子,则扩容if( ((float)map->size+1)/map->capacity > LOAD_FACTOR){grow_capacity(map);idx = hash(key, strlen(key), map->hashseed) % map->capacity; //重新计算索引}Node* new_node = malloc(sizeof(Node));new_node->key = key;new_node->val = val;//头插法new_node->next = map->table[idx];map->table[idx] = new_node;map->size++;return NULL;
}
(4)查找 get
V hashmap_get(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {return curr->val;}curr = curr->next;} //curr == NULLreturn NULL;
}
(5)删除 delete
//删除键值对,如果key不存在,则什么也不做
void hashmap_delete(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* prev = NULL;Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//删除curr结点if (prev == NULL) {map->table[idx] = curr->next;}else{prev->next = curr->next;}free(curr);map->size--;return;}prev = curr;curr = curr->next;} // curr == NULL
}
(6)哈希表的扩容
void grow_capacity(HashMap* map) {int new_capacity = 2 * map->capacity;Node** new_table = calloc(new_capacity, sizeof(Node*)); if (!new_table) {printf("calloc failed of new_arr in grow_capacity\n");exit(1);}//重新映射(rehash)map->hashseed = time(NULL)-10086;for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;//使用新的容量重新计算哈希值并找到新的索引int new_idx = hash(curr->key, strlen(curr->key), map->hashseed) % new_capacity;//将当前节点插入到新表的相应位置,头插法curr->next = new_table[new_idx];new_table[new_idx] = curr;curr = next;}}//释放旧的表free(map->table);//更新结构体信息map->capacity = new_capacity;map->table = new_table;return;
}
(7)完整代码
//HashMap.h
#include <stdint.h>// HashMap.h
typedef char* K;
typedef char* V;typedef struct node {K key;V val;struct node* next;
} Node;typedef struct {Node** table;int size; //实际大小int capacity; //最大容量uint32_t hashseed;
} HashMap;HashMap* hashmap_create();
void hashmap_destroy(HashMap* map);
V hashmap_put(HashMap* map, K key, V val);
V hashmap_get(HashMap* map, K key);
void hashmap_delete(HashMap* map, K key);
static uint32_t hash(const void* key, int len, uint32_t seed);
//HashMap.c
#include "HashMap.h"
#include <stdlib.h>
#include <time.h>
#include <stdio.h>#define DEFAULT_CAPACITY 8
#define LOAD_FACTOR 0.75HashMap* hashmap_create(void) {HashMap* map = malloc(sizeof(HashMap));map->table = calloc(DEFAULT_CAPACITY, sizeof(Node*));map->size = 0;map->capacity = DEFAULT_CAPACITY;map->hashseed = time(NULL);return map;
}void hashmap_destroy(HashMap* map) {//1.释放所有的结点(遍历哈希表)for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;free(curr);curr = next;} // curr == NULL}//2.释放动态数组free(map->table);//3.释放HashMap结构体free(map);
}/* murmurhash2 */
// key: 关键字的地址
// len: 关键字的字节长度
// seed: 哈希种子,避免攻击
static uint32_t hash(const void* key, int len, uint32_t seed) {const uint32_t m = 0x5bd1e995;const int r = 24;uint32_t h = seed ^ len;const unsigned char* data = (const unsigned char*)key;while (len >= 4) {uint32_t k = *(uint32_t*)data;k *= m;k ^= k >> r;k *= m;h *= m;h ^= k;data += 4;len -= 4;}switch (len){case 3: h ^= data[2] << 16;case 2: h ^= data[1] << 8;case 1: h ^= data[0];h *= m;};h ^= h >> 13;h *= m;h ^= h >> 15;return h;
}void grow_capacity(HashMap* map) {int new_capacity = 2 * map->capacity;Node** new_table = calloc(new_capacity, sizeof(Node*)); if (!new_table) {printf("calloc failed of new_arr in grow_capacity\n");exit(1);}//重新映射(rehash)map->hashseed = time(NULL)-10086;for (int i = 0; i < map->capacity; i++) {Node* curr = map->table[i]; while (curr) {Node* next = curr->next;//使用新的容量重新计算哈希值并找到新的索引int new_idx = hash(curr->key, strlen(curr->key), map->hashseed) % new_capacity;//将当前节点插入到新表的相应位置,头插法curr->next = new_table[new_idx];new_table[new_idx] = curr;curr = next;}}//释放旧的表free(map->table);//更新结构体信息map->capacity = new_capacity;map->table = new_table;return;
}// 如果key不存在:则添加(key, val)。如果key存在,更新key关联的值,并返回原来关联的值。
//put:返回旧值,若是新结点则返回NULL
V hashmap_put(HashMap* map, K key, V val) {//对key进行哈希,判断key在哪个哈希桶中(哪一条链表中)int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//b.更新key关联的值,并返回原来的值V oldval = curr->val;curr->val = val;return oldval;}curr = curr->next;}//a.添加一个结点保存键值对 key-val,并返回NULL//判断扩容:如果达到负载因子,则扩容if( ((float)map->size+1)/map->capacity > LOAD_FACTOR){grow_capacity(map);idx = hash(key, strlen(key), map->hashseed) % map->capacity; //重新计算索引}Node* new_node = malloc(sizeof(Node));new_node->key = key;new_node->val = val;//头插法new_node->next = map->table[idx];map->table[idx] = new_node;map->size++;return NULL;
}V hashmap_get(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {return curr->val;}curr = curr->next;} //curr == NULLreturn NULL;
}//删除键值对,如果key不存在,则什么也不做
void hashmap_delete(HashMap* map, K key) {//对key进行哈希,判断key在哪个哈希桶中int idx = hash(key, strlen(key), map->hashseed) % map->capacity;//遍历链表Node* prev = NULL;Node* curr = map->table[idx];while (curr) {if (strcmp(curr->key, key) == 0) {//删除curr结点if (prev == NULL) {map->table[idx] = curr->next;}else{prev->next = curr->next;}free(curr);map->size--;return;}prev = curr;curr = curr->next;} // curr == NULL
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "HashMap.h"int main(void) {//1.创建空的哈希表HashMap* map = hashmap_create();//2.添加键值对hashmap_put(map, "liuqiangdong", "zhangzetian");hashmap_put(map, "wangbaoqiang", "marong");hashmap_put(map, "wenzhang", "mayili");hashmap_put(map, "jianailiang", "lixiaolu");hashmap_delete(map, "liuqiangdong");hashmap_delete(map, "peanut");hashmap_destroy(map);return 0;
}
(6)性能分析
get:O(L)
put:O(L)
delete:O(L)
当加载因子足够小,就认为是O(1)
加载因子/装填因子(Load Factor) 一般为0.75
哈希表是用空间换时间的数据结构
(7)哈希表的应用:存储键值对数据
举例:Redis(C语言实现),是内存数据库,是键值对数据库,底层大量使用了哈希表。用Redis作缓存。
6.位图
(1)模型
位的数组。位图是内存紧凑的数据结构
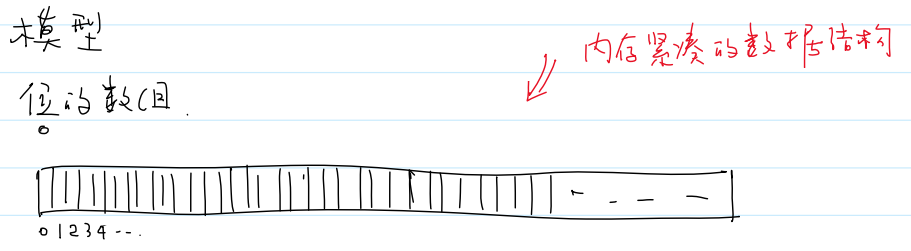
Q:为什么需要构建一个专门的数据结构来表示位的数组?
A:计算机的最小寻址单元是字节,而不是位
(2)基本操作
(1)增加:set,将某一位置为1
(2)删除:①unset,将某一位置为0 ②clear,将所有位置0
(3)查找:isset,检查某一位是否为1
(4)遍历
(3)实现
(1)Word(uint32_t):①大小是确定的 ②无符号整数
(2)定义宏:
#define BITS_PER_WORD 32 //一个字有多少比特
#define BITMAP_SHIFT 5
#define BITMAP_MASK 0x1F //取余,对32取余
#define BITMAP_SIZE(bits) (bits+BITS_PER_WORD-1) >> BITMAP_SHIFT //存这些位需要大? 向下取整变向上取整
//BitMap.h
// BitMap.h
#include <stdint.h>
#include <stdlib.h>
#include <stdbool.h>typedef struct {//uint32_t:1.大小确定,是32位 2.无符号数 (这里不能用int,因为int类型可能32位可能64位,不同系统大小不同)uint32_t* array; //array 是动态数组size_t bits; //number of bits in the array
} BitMap;BitMap* bitmap_create(size_t bits);
void bitmap_destroy(BitMap* bm);
void bitmap_set(BitMap* bm, size_t n); // n is a bit index
void bitmap_unset(BitMap* bm, size_t n);
bool bitmap_isset(BitMap* bm, size_t n);
void bitmap_clear(BitMap* bm);
//BitMap.c
#include "BitMap.h"
#include <stdlib.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#include <stdio.h>#define BITS_PER_WORD 32
#define BITMAP_SHIFT 5
#define BITMAP_MASK 0X1F
#define BITMAP_SIZE(bits) ((bits+BITS_PER_WORD-1) >> BITMAP_SHIFT) //存储bits位, 需要多少个字 wordtypedef uint32_t Word;// bits 是 位图的长度
BitMap* bitmap_create(size_t bits) {BitMap* bm = malloc(sizeof(BitMap));bm->array = (Word*)calloc(BITMAP_SIZE(bits), sizeof(Word));bm->bits = bits;return bm;
}void destroy(BitMap* bm) {free(bm->array);free(bm);
}void grow_capacity(BitMap* bm, size_t bits) {//位图:内存紧凑的数据结构//扩容策略: 需要多大,就申请多大的内存空间uint32_t* new_array = realloc(bm->array, BITMAP_SIZE(bits) * sizeof(Word));if (!new_array) {printf("Error: realloc failed in grow_capacity\n");exit(1);}bm->array = new_array;//将扩容的部分置为0int bytes = (BITMAP_SIZE(bits) - BITMAP_SIZE(bm->bits)) * sizeof(Word);memset(bm->array + BITMAP_SIZE(bm->bits), 0, bytes);
}//设置索引为n的位
//100, 32*4 = 128
void bitmap_set(BitMap* bm, size_t n) {if (n >= bm->bits) {if (BITMAP_SIZE(n + 1) > BITMAP_SIZE(bm->bits)) {//扩容grow_capacity(bm, n + 1);}bm->bits = n + 1;}//设置第n位//如何表示第n位 (word,offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;bm->array[word] |= (0x1 << offset);
}void bitmap_unset(BitMap* bm, size_t n) {if (n >= bm->bits) {return;}//找到第n位 (word,offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;return bm->array[word] & (0x1 << offset);
}bool bitmap_isset(BitMap* bm, size_t n) {if (n >= bm->bits) {return false;}//找到第n位 (word, offset)size_t word = n >> BITMAP_SHIFT;size_t offset = n & BITMAP_MASK;return bm->array[word] & (0x1 << offset);
}void bitmap_clear(BitMap* bm) {size_t bytes = BITMAP_SIZE(bm->bits) * sizeof(Word);memset(bm->array, 0, bytes);
}
//main.c
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include "BitMap.h"int main(void) {BitMap* bm = bitmap_create(100);bitmap_set(bm, 9);bitmap_set(bm, 5);bitmap_set(bm, 2);bitmap_set(bm, 7);bitmap_set(bm, 120);bitmap_set(bm, 128);//bitmap_unset(bm, 9);//bitmap_unset(bm, 5);//bitmap_unset(bm, 2);//bitmap_unset(bm, 7);//bitmap_unset(bm, 10);// printf("bitmap_isset(bm, 7) = %s\n", bitmap_isset(bm, 7) ? "true" : "false");// printf("bitmap_isset(bm, 10) = %s\n", bitmap_isset(bm, 10) ? "true" : "false");bitmap_clear(bm);return 0;
}
(4)位图的应用
位图的特点:内存紧凑、可以存储两种状态
①存储两种状态 (内存吃紧的情况下,数据量很大):QQ10亿用户,存储每一位用户的在线状态(是/否)
②排序并去重:直接把对应数字的位置1,相当于去重了,再遍历位图把为1的摘出来
7.二叉树
(1)定义
二叉树的定义:每一个结点的度≤2 (度:结点的孩子的数目)
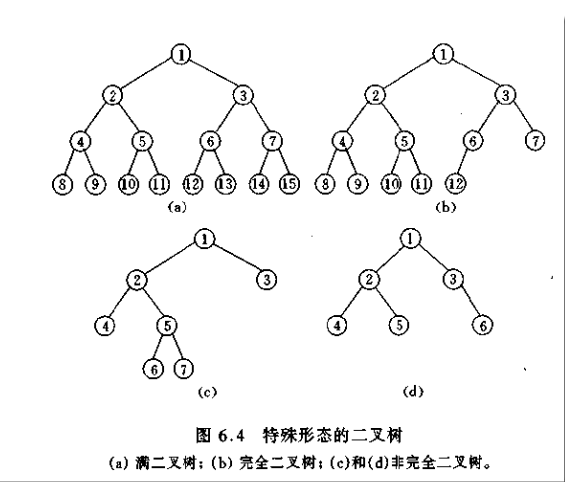
(2)二叉树的特殊形态
1.完全二叉树:若二叉树的深度为 h,除第 h 层外,其它各层(1~h-1)的结点数目都达
到最大值,第 h 层的结点都连续排列在最左边,这样的二叉树就是完全二叉树。
2.满二叉树:每一层的结点数目都达到最大值(包括最下面一层) [满二叉树真包含于完全二叉树]
3.二叉搜索树 (BST,Binary Search Tree)
又叫二叉排序树,要求树中的结点可以按照某个规则进行比较,其定义如下:
①左子树中所有结点的 key 值都比根结点的 key 值小,并且左子树也是二叉搜索树。
②右子树中所有结点的 key 值都比根结点的 key 值大,并且右子树也是二叉搜索树。
(3)二叉搜索树BST的实现
查找路径:一条带选择的链表,尾插法
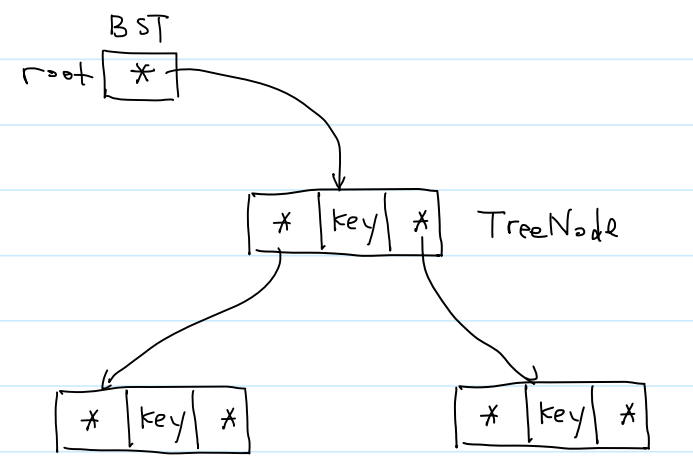
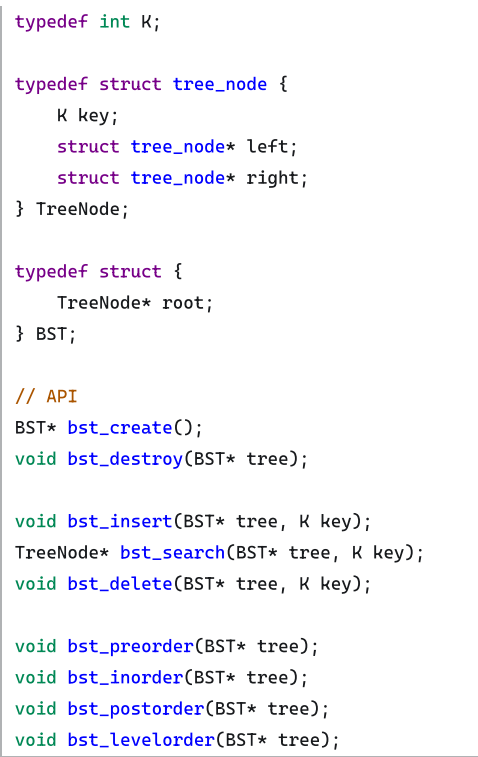
(0)结构体定义
①以前王道书应试的做法,就是直接在第一个结构体最后一行加上 *BST
②之所以把结构体指针 TreeNode* 另起一个结构体,就是为了方便后续扩展。可能BST结构体中还要加入size、height等成员。
typedef int K;typedef struct tree_node {K key;struct tree_node* left;struct tree_node* right;
} TreeNode;typedef struct {TreeNode* root;
} BST;
①创建:create
BST* bst_create(void) {return calloc(1, sizeof(BST));
}
②增加:BST的插入 insert
③查找:BST的查找 search
TreeNode* bst_search(BST* tree, K key) {TreeNode* curr = tree->root; //申请一个树结点指针,指向根结点while (curr) {int cmp = key - curr->key;if (cmp < 0) { //目标值 < 当前值curr = curr->left; //向左走}else if (cmp > 0) { //目标值 > 当前值curr = curr->right; //向右走 }else { //目标值 = 当前值return curr; //找到目标,返回当前树结点指针}} // curr == NULLreturn NULL; //未找到目标,返回空指针
}
④删除:BST的删除 delete
⑥遍历
1)深度优先遍历:递归,需要函数调用栈
i.前序遍历
前序遍历 / 先序遍历 / 先根遍历
时间复杂度:O(4n)=O(n)
void preorder(TreeNode* root) {//边界条件if (root == NULL) {return;}//递归公式:根左右printf("%d", root->key);preorder(root->left);preorder(root->right);
}//先根遍历:委托(外包)
void bst_preorder(BST* tree) {preorder(tree->root);printf("\n");
}
ii.中序遍历
二叉搜索树的中序遍历是有序的,因此又称为二叉排序树。
void inorder(TreeNode* root) {// 边界条件if (root == NULL) {return;}// 递归公式: 左根右inorder(root->left); // 遍历左子树printf("%d ", root->key); // 遍历根结点inorder(root->right); // 遍历右子树
}//中序遍历:委托(外包)
void bst_inorder(BST* tree) {inorder(tree->root);printf("\n");
}
iii.后序遍历
void postorder(TreeNode* root) {//边界条件if (root == NULL) {return;}//递归公式:左右根postorder(root->left);postorder(root->right);printf("%d ", root->key);
}//后序遍历:委托(外包)
void bst_postorder(BST* tree) {postorder(tree->root);printf("\n");
}
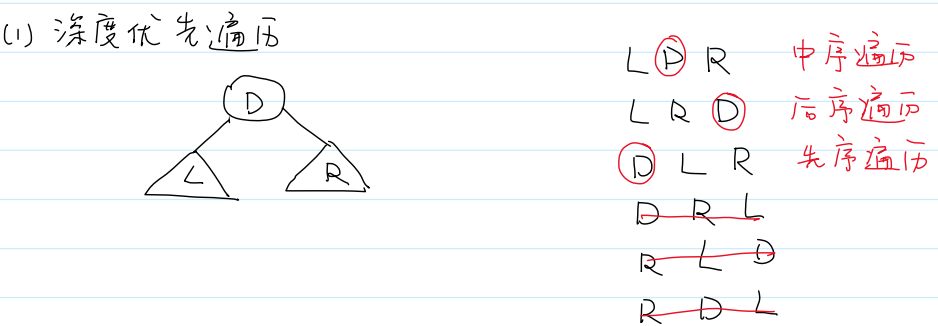
三个结点排列组合有6种遍历,但要求左先于右,故只剩3种
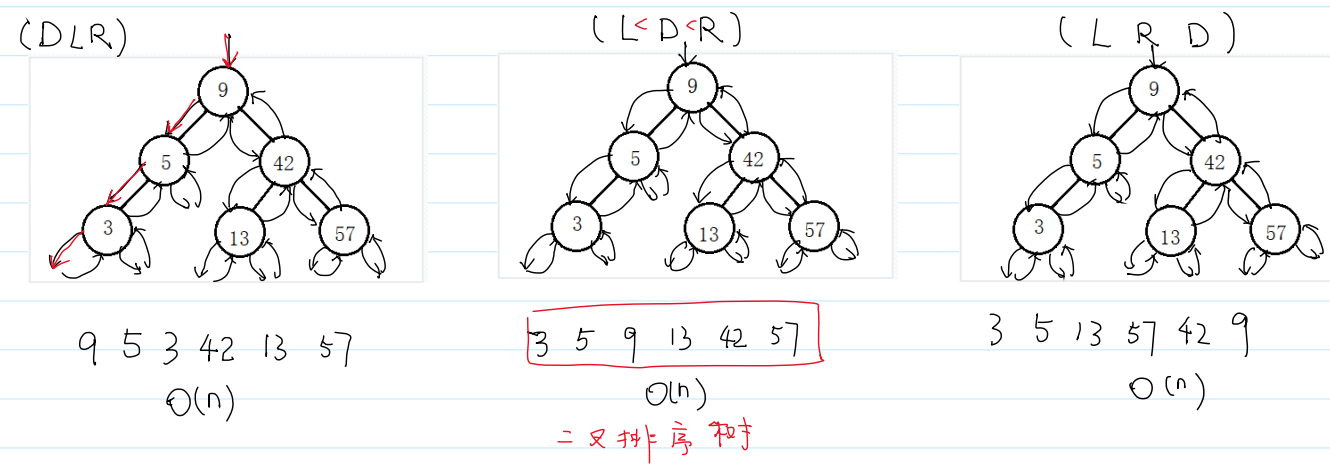
路径完全相同,只是访问顺序不同
2)广度优先遍历:
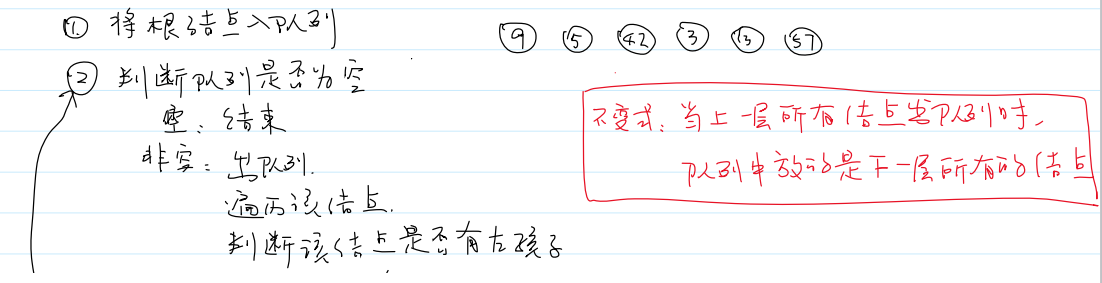
iv.层序遍历(层次遍历):需要队列,需要手动创建
1.步骤:
①申请并初始化结点
②根结点入队
③循环判断队列是否非空,若非空,队头结点出队,遍历该结点,若该结点有左孩子,则左孩子入队,若该结点有右孩子,则右孩子入队。

2.具体实现:
// 广度优先遍历:层次遍历
void bst_levelorder(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root); //根结点入队列while (!queue_empty(q)) { //判断队列是否为空TreeNode* node = queue_pop(q); //队头结点出队并遍历printf("%d ", node->key);if (node->left) queue_push(q, node->left);if (node->right) queue_push(q, node->right);}
}
例题:层序遍历实现分层打印
思路1:记录当前层和下一层的结点数
//分层打印:实现1
void bst_levelorder_fenceng1(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root);int cur_count = 1; //当前层的结点数目int next_count = 0;//下一层的结点数目while (!queue_empty(q)) {TreeNode* node = queue_pop(q);cur_count--;printf("%d ", node->key);if (node->left) {queue_push(q, node->left);next_count++;}if (node->right) {queue_push(q, node->right);next_count++;}//分层打印if (cur_count == 0) {printf("\n");cur_count = next_count;next_count = 0;}}printf("\n");
}
思路2:记录每层的结点数
void bst_levelorder_fenceng2(BST* tree) {Queue* q = queue_create();queue_push(q, tree->root);while (!queue_empty(q)) {int size = q->size; //记录当前层的结点数for (int i = 0; i < size; i++) {TreeNode* node = queue_pop(q);printf("%d ", node->key);if (node->left) {queue_push(q, node->left);}if (node->right) {queue_push(q, node->right);}}printf("\n");}printf("\n");
}
⑦销毁:destroy
1.后序遍历free
void destroy(TreeNode* root) { //后序遍历实现释放//边界条件if (root == NULL) {return;}//递归公式:左右根destroy(root->left);destroy(root->right);free(root); // 释放根节点
}//析构函数1:后序遍历
void bst_destroy(BST* tree) {//0.错误处理if (tree == NULL) {printf("tree == NULL, destroy failed.\n");return;} //1.释放树的结点【委托(外包)】 destroy(tree->root);//2.释放BST结构体free(tree);
}
2.层序遍历free
//析构函数2:层序遍历
void bst_destroy_2(BST* tree) {//容错处理if (!tree || !tree->root) return;//层序遍历Queue* queue = queue_create();queue_push(queue, tree->root); // 将根结点入队列while (!queue_empty(queue)) { // 判断队列是否为空 TreeNode* node = queue_pop(queue); // 出队列,销毁这个节点if (node->left) {queue_push(queue, node->left);}if (node->right) {queue_push(queue, node->right);}free(node); // 释放节点}free(tree); // 节点销毁
}
(4)BST性能分析
1.n个结点的BST树的高度为h,h的范围是[log₂n,n]
2.BST的效率:
①插入 insert:O(h)
②删除 delete:O(h)
③查找 search:O(h)
3.BST的优点/使用场景:①保证有序性 ②需要动态添加和删除元素
4.缺陷:不能保证O(logn)的时间复杂度的插入、删除、查找,最坏情况是单支树。因为总朝着一个方向进行操作(删右添左),性能会退化,缺少调平衡。因此引入了平衡二叉搜索树
5.对比有序数组的效率:
①增:O(n)
②删:O(n)
③查:O(logn)
④遍历:O(n)
有序数组的使用场景:①保证有序性 ②存储静态数据
(5)平衡二叉搜索树
①AVL树
AVL树平衡的定义:对任意一个结点,左子树和右子树的高度之差不超过1
定义严格,导致:①高度比较小 ②每次添加和删除时需要进行的调整较多
故 AVL树,查找效率高,添加和删除效率低于RBT
②红黑树 RBT
1.红黑树平衡的定义:整棵树的高度为O(logn)
定义比较宽松,导致:①高度比较高 ②每次添加和删除时需要进行的调整操作少
故 红黑树,添加和删除效率高,查找的效率低于AVL树。
在不断的实验中发现,红黑树的效率总体来说高于AVL树。故日常生产更多使用红黑树。
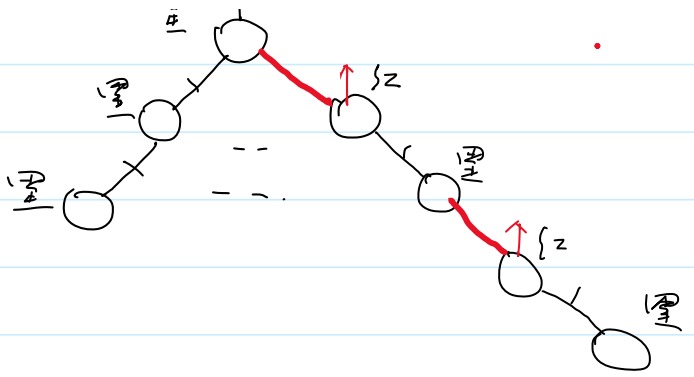
2.模型
提升,同一层的,类似原子间作用力
①3-结点有两种表示方式:提升最左边或者提升最右边
②4-结点只有一种表示方式,就是高度最低的这种,高度为2。其余高度为3的表示方式都是错的。即不能有两条连续的红色边


但边是逻辑结构,实际不存在,那么如何表示边的颜色呢?
可以考虑用结点来表示边的颜色。
那么用父结点还是孩子结点来表示边的颜色呢?
答案是用孩子结点来表示边的颜色。因为父结点对应两条边,孩子结点向上只有一条边。
黑高就是2-3-4树的高度
红黑树的高度最多是黑高的2倍。也是logn级别
3.基本操作 (和BST一样)
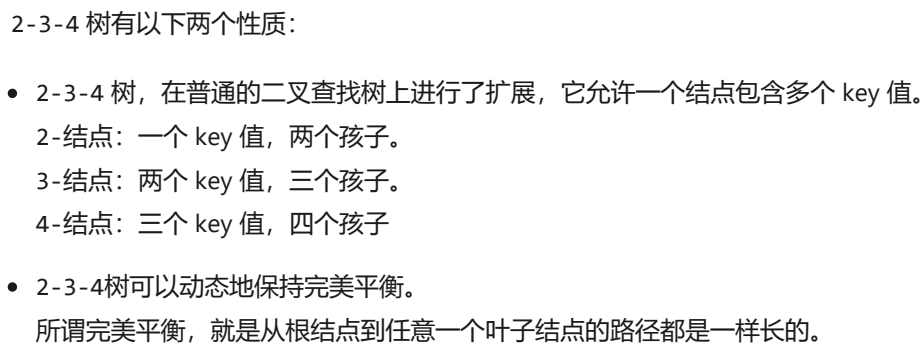
(5)B树
①2-3-4树 (四阶B树)
1.模型
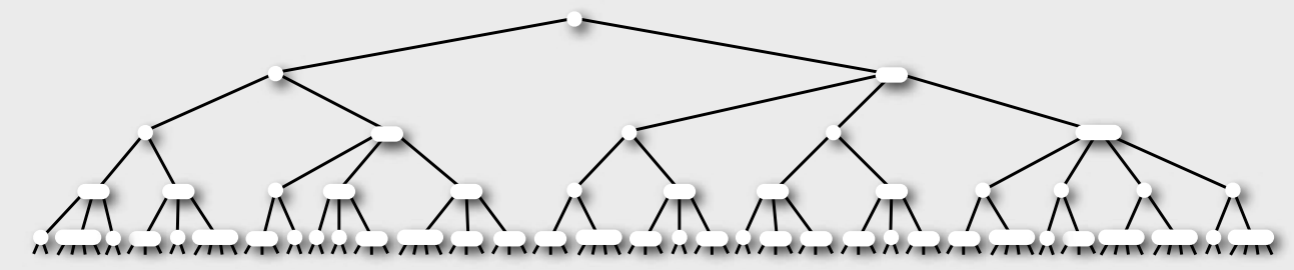
2.性质
①根节点分裂,树高才+1
②动态保持完美平衡
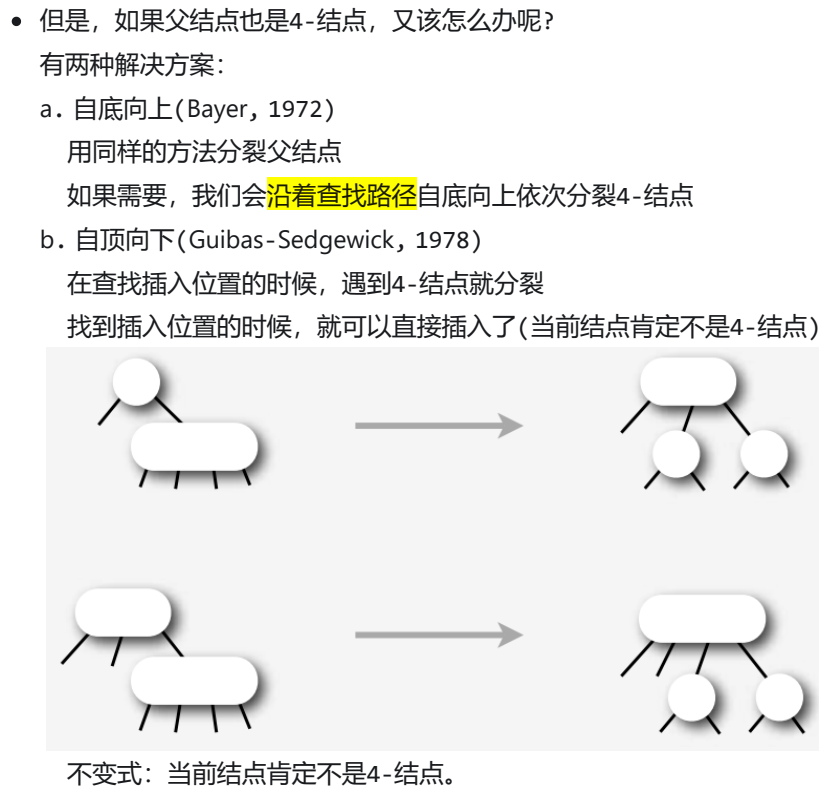
3.4-结点分裂
①自底向上(Bayer, 1972)
② 自顶向下(Guibas-Sedgewick, 1978):遇到4-结点就分裂,当前结点不是4-结点。
4.实现
红黑树是2-3-4树的具体实现,2-3-4树是一种模型
(6)二叉搜索树的应用
(7)代码缩进的层次越高,代码的复杂度就越高,可读性越差
循环的两个点:循环退出点、循环不变式
递归的两个核心点:边界条件、递归公式
(十二) 排序和二分查找
1.二分查找
1.前提:
①有序 :具有某种顺序,不一定非得是 从小到大或者从大到小,比如循环有序
②数组:随机查找。通过每次比较,可以丢掉几乎一半的区间。
2.性能:O(logn)
3.作用:
比起顺序查找,二分查找大量减少了比较操作 。
即使是比较小的数组,也可能因为存储的元素较大(长的字符串、大的集合),导致比较很慢。也可以用二分查找减少比较次数。
4.实现:2种实现 + 4种变式
(1)递归实现
//递归实现的子函数
int binarysearch_1(int arr[], int left, int right, int key) {//边界条件if (left > right) return -1;//递归公式//int mid = (left + right) / 2;int mid = left + (right-left)/2; //避免整数溢出 if (key < arr[mid]) { //目标值 < 中值 return binarysearch_1(arr, left, mid - 1, key); //往左走 } else if (key > arr[mid]) { //目标值 > 中值return binarysearch_1(arr, mid + 1, right, key); //往右走} else { //目标值 = 中值 return mid; //直接返回下标(索引)}
}//1.二分查找的递归实现:返回的是key的索引
int BinarySearch_1(int arr[], int n, int key) {//(1)数组不好递归,区间好递归 (2)封装,避免用户手动输入区间,丑陋的接口return binarysearch_1(arr, 0, n - 1, key); //闭区间: [0 , n-1]
}
(2)循环实现
//2.二分查找的循环实现
int BinarySearch_2(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {//int mid = (left + right) / 2;int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) { //目标值 < 中间值right = mid - 1; //向左走} else if (key > arr[mid]) { //目标值 > 中间值left = mid + 1; //向右走} else { //目标值 = 中间值return mid; //返回中间值的索引}}return -1; //没找到,返回-1,表示 key 不存在
}
5.二分查找的4种变种
(1)查找第一个与key值相等的元素
//查找第一个和key值相等的元素
int BinarySearch_3(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {//int mid = (left + right) / 2;int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) {right = mid - 1;} else if (key > arr[mid]) {left = mid + 1;} else { //相等,但是要找从左数第一个与key值相等的if(mid == left || arr[mid-1] < key) right = mid - 1; //区间向左缩小1}}return -1;
}
(2)查找最后一个与key值相等的元素
//4.查找最后一个和key值相等的元素
int BinarySearch_4(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (key < arr[mid]) {right = mid - 1;}else if (key > arr[mid]) {left = mid + 1;}else { // key == arr[mid],但是要找从左数最后一个与key值相等的if (mid == right || key < arr[mid + 1] ) {return mid;}left = mid + 1; //区间向右缩小1}}return -1;
}
(3)查找第一个大于等于key值的元素
//5.查找第一个大于等于key值的元素:先向右找到比key大的,再逐步向左走找到第一个
int BinarySearch_5(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (arr[mid] < key) {left = mid + 1;} else { // arr[mid] >= keyif (mid == left || arr[mid - 1] < key) {return mid;}right = mid - 1;}}return -1;
}
(4)查找最后一个小于等于key值的元素
//6.查找最后一个小于等于key值的元素:先向左找到比key小的,再逐步向右找到最后一个
int BinarySearch_6(int arr[], int n, int key) {int left = 0, right = n - 1;while (left <= right) {int mid = left + (right-left >> 1); //避免整数溢出 if (arr[mid] > key) {right = mid - 1; //向左} else { //arr[mid] <= keyif (mid == right || arr[mid+1] > key) {return mid;}left = mid + 1; //逐步向右}}return -1;
}
6.具体应用:IP地址归属地查询
2.排序算法分析
0.排序的目的,是方便查找
1.分析/评估算法的能力,比算法的实现更重要
2.如何分析一个排序算法:时间复杂度、空间复杂度、稳定性
(1)时间复杂度:
①最好情况:对应它的应用场景
②最坏情况:算法的下限
③平均情况:
④常数项和低阶项:
(2)空间复杂度:
我们需要重点关注原地排序(store in place),也就是空间复杂度为 O(1) 的排序。
(3)稳定性:
数据集中"相等"的元素,如果排序前和排序后的相对次序不变,那么这个排序算法
就是稳定的。稳定性是排序算法一个很重要的指标。
3.不同场景选择不同的排序算法 (没有最好的排序算法,只有最合适的排序算法)
3.选择排序
1.思路:
遍历从未排序的元素中,找到最小元素的下标,一趟结束找出最小,进行交换
共n-1趟。每趟重置 j = i+1
2.代码
void SelectionSort(int arr[], int n) {for (int i = 0; i < n-1; i++) {int min_index = i;for (int j = i+1; j < n ; j++) {if (arr[j] < arr[min_index]) {min_index = j;}}swap(&arr[min_index], &arr[i]);}print_array(arr, 10);
}
3.性能分析
(1)时间复杂度:O(n²)
比较次数:n-1 + n-2 + … = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 。无论初始序列如何,一定会进行n-1趟简单选择排序。一定会比较 n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次,但是交换次数很少
(2)空间复杂度:O(1)
(3)稳定性:选择排序是不稳定的,因为会发生长距离的交换。例如:
[2, 2', 1]
经过简单选择排序第一轮就变成了
[1, 2', 2] //2与2'的相对位置发生改变
4.冒泡排序
1.思路:
确定未排序区域。
2.优化:冒泡排序可以提前结束。如果本趟冒泡没有发现逆序对(未发生交换),则认为整个数组已经有序,可以直接结束。
3.实现
void BubbleSort(int arr[], int n) {for (int i = 0; i < n-1; i++) {for (int j = 0; j < n-1-i; j++) { //大值从前往后冒泡if (arr[j] > arr[j+1]) {swap(&arr[j], &arr[j+1]);}}//for (int j = n - 1; j > i; j--){ //小值从后往前冒泡// if (arr[j-1] > arr[j]) {// swap(&arr[j-1], &arr[j]);// }//}}print_array(arr, 10);
}
优化:冒泡排序可以提前结束:本趟冒泡没有发现逆序对
void swap(int* a,int* b){int temp = *a;*a = *b;*b = temp;
}void BubbleSort(int arr[],int n){for(int i = 0; i < n-1; i++){ //n-1趟bool isSwap = false; for(int j = n-1; j > i; j--){ //从后向前冒if(arr[j-1] > arr[j]){ //稳定的,仅交换逆序对swap(&arr[j-1], &arr[j]);isSwap = true;}}if(isSwap == false) return; //优化:某一趟排序未发生交换,冒泡排序可以提前结束}
}
4.性能分析
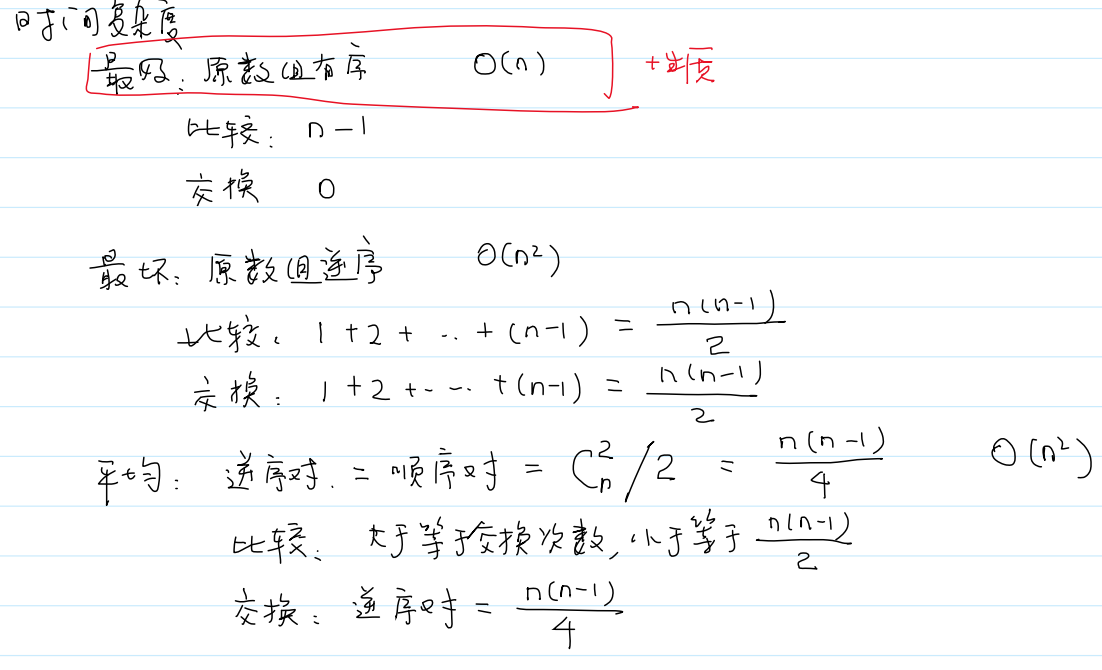
(1)时间复杂度:O(n²)
①最好情况:原数组有序, O(n)
比较次数:n-1
交换次数:0
②最坏情况:原数组逆序, O(n²)
比较次数:(n-1) + (n-2) + … + 1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
交换次数:(n-1) + (n-2) + … + 1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
③平均情况:O(n²)
比较次数:大于等于交换的次数,小于等于 n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1)
交换次数:n(n-1)/4 (等于逆序对的个数)
冒泡和插入排序的分析方法一致,性质一模一样。三种情况的时间复杂度相同。
但常数项不同,插入排序的交换仅1次赋值(没有用到swap函数),而冒泡排序的交换要4次赋值,故同一个O复杂度下,插入排序效率更高。
(2)空间复杂度:O(1)
(3)稳定性:冒泡排序是稳定的,因为只有相邻的逆序对才进行交换,遍历整个未排序区域,将逆序对降低为0
5.插入排序
插入排序(Insertion sort)
1.思路:前半部分是手牌,后半部分是无序的牌堆。从牌堆拿起一张,从手牌最大开始比较,找到第一个小于等于value的元素,插入到它的后面。
插入排序,是从后往前遍历已有序的区域,从有序区域的最后一个开始往前遍历
2.实现
void InsertionSort(int arr[], int n) {for (int i = 1; i < n; i++) {int insertval = arr[i];int j = i - 1; //从后往前遍历有序区域,从有序区域的最后一个开始while (j >= 0 && arr[j] > insertval) {arr[j + 1] = arr[j]; //元素右移j--;}arr[j + 1] = insertval;}print_array(arr, 10);
}
3.性能分析
(1)时间复杂度:
①最好情况:原数组有序
比较n-1次,交换0次
时间复杂度为O(n)
插入排序,基本有序的数组时间复杂度最低,为O(n)。甚至快过快速排序等。排序 至少需要遍历一遍数组,O(n)的时间复杂度就是最低的了。
②最坏情况:原数组逆序
比较 1+2+3+…+n-1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次,交换 1+2+3+…+n-1 = n ( n − 1 ) 2 \frac{n(n-1)}{2} 2n(n−1) 次
时间复杂度为O(n²)
③平均情况:O(n²)
(2)空间复杂度:O(1),原地排序
(3)稳定性:
插入排序是稳定的,因为只交换相邻的逆序对,能保证原来的顺序。
4.使用场景
当数组满足:
①数组长度较小
②原数组基本有序(元素离最终位置相差不远)
插入排序可以达到O(n)的时间复杂度。
插入排序在对几乎已经排好序的数据排序时,效率很高,可以达到线性排序的效率。
6.希尔排序
1.历史地位:希尔排序是第一个时间复杂度低于O(n²)的排序算法
2.思想:
希尔排序,又叫缩小增量排序。
①多人抓牌,每个人手牌有序。人数由多到少
②倒数第二次时,gap = 2,任意元素离最终位置的距离都<2,此时数组已经基本有序。
③最后一次希尔排序gap为1,退化为插入排序。
④减到0结束排序。
减少了长距离一步步交换,减少了移动的次数。长距离交换使得小数可以快速达到最终位置。
希尔排序的效率与 gap 序列相关,希尔本人推荐的 gap 序列为:n/2, n/4, …, 1。
但这个序列并不是最佳的( ╯□╰ )…
3.实现
gap个人轮流抓牌。
加个while循环,所有的1改成gap。
void ShellSort(int arr[], int n) {int gap = n / 2;while (gap != 0) {//组间插入排序for (int i = gap; i < n; i++) {int insertval = arr[i];int j = i - gap; //遍历有序区域while (j >= 0 && arr[j] > insertval) {arr[j + gap] = arr[j];j -= gap;}arr[j + gap] = insertval;}gap /= 2;}print_array(arr, 10);
}
4.设计的思考:
利用了插入排序的优点( 基本有序时为O(n) ),避免了插入排序的缺点 (元素较小的元素需要长途跋涉的比较才能到达前面。希尔排序设计了长距离交换,使得移动减少。)
5.效率分析:
(1)时间复杂度:和gap序列有关,整体<O(n²)
(2)空间复杂度:O(1)
(3)稳定性:不稳定
长距离交换可能导致同值的相对位置发生改变
6.比较
希尔排序,相比插入排序:牺牲了稳定性,换取了时间
7.归并排序
(1)分治思想
1.分治思想:

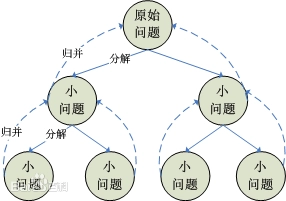
2.分治与递归的关系
①分治思想:算法设计思想
②递归:一种代码实现方式
关系:不同维度的东西,分治的思想一般用递归来实现
3.分治思想的应用:
二分查找、归并、快速排序、矩阵相乘
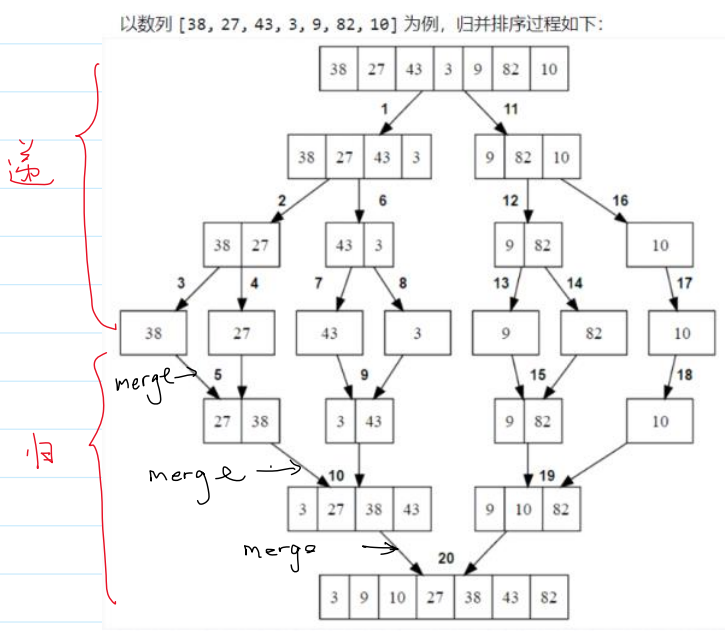
(2)合并操作:Merge()
1.过程
递归图:
2.实现
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <stdlib.h>
#define N 10void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}int temp[N];void Merge(int arr[], int left, int mid, int right) {int i = left, j = mid + 1, k = left;//复制for (i = left; i <= right; i++) temp[i] = arr[i];while (i <= mid && j <= right) {if (temp[i] <= temp[j]) {arr[k++] = temp[i++];}else {arr[k++] = temp[j++];}}while (i <= mid) arr[k++] = temp[i++];while (j <= right) arr[k++] = temp[j++];
}void MergeSort(int arr[], int left, int right) {//边界条件if (left >= right) return;//递归公式int mid = left + (right - left >> 1);MergeSort(arr, left, mid);MergeSort(arr, mid + 1, right);Merge(arr, left, mid, right);
}void merge_sort(int arr[], int n) {MergeSort(arr, 0, n - 1);
}int main(void) {int arr[] = { 10,9,8,7,6,5,4,3,2,1 };merge_sort(arr, N);print_array(arr, N);return 0;
}
3.性能分析
(1)时间复杂度:
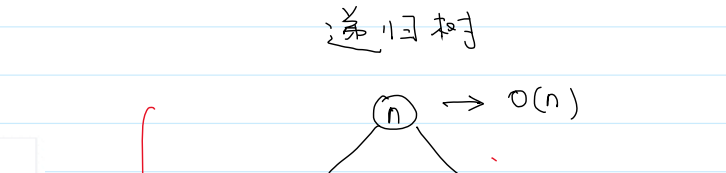
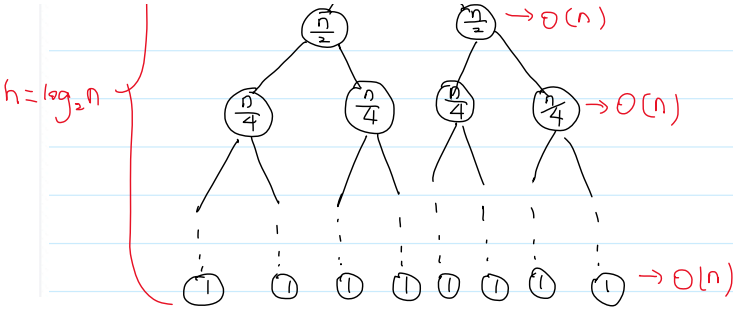
归并排序对排序不敏感,任何情况下时间复杂度都是O(nlogn)
分析:使用递归树,来分析递归程序的时间复杂度
数组长度为n,Merge()是O(n)
递归树深度是log₂n
T(n) = log₂n·O(n) = log₂n·cn = O(nlog₂n) = O(nlogn)
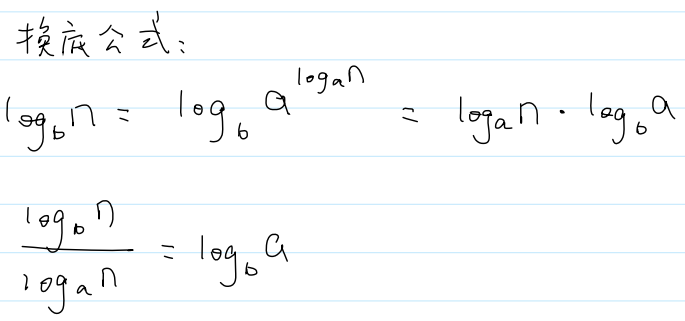
大O表示法不关心底是多少,因为有换底公式
(2)空间复杂度:
递归调用栈O(logn) + 辅助数组O(n) = O(n)
归并排序的空间复杂度太高了,内存消耗很大,不能用于大数组的排序
空间复杂度高是归并排序比较显著的缺陷。
(3)稳定性:
稳定的。arr[i] <= arr[j]
8.快速排序
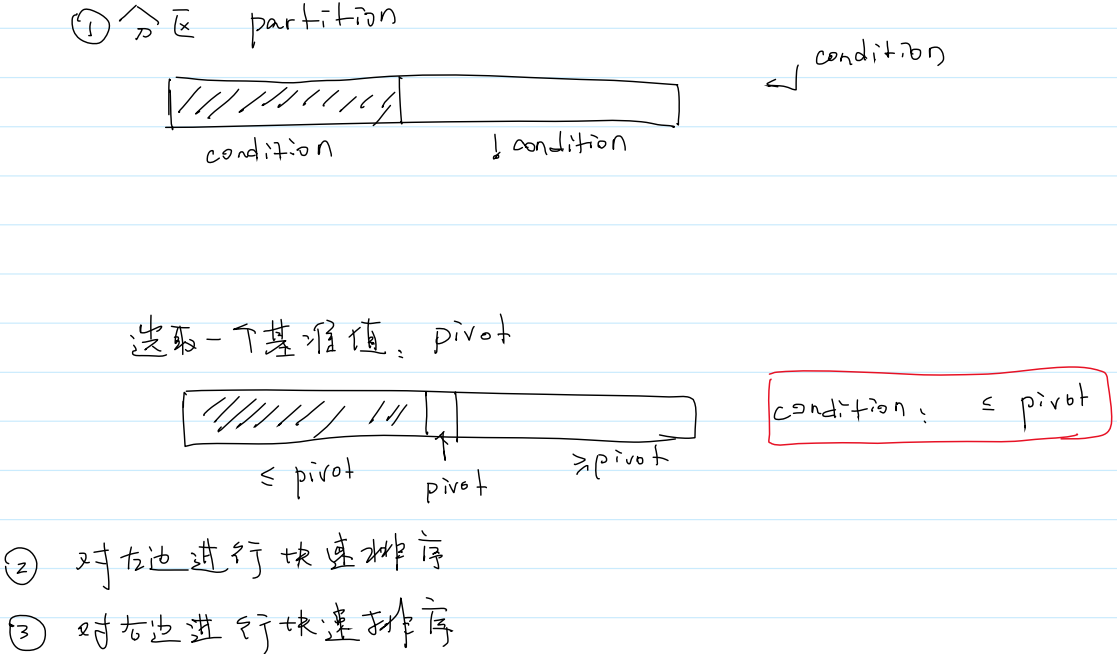
1.快速排序(Quick sort)是建立在分区操作上的一种高效的排序算法。快速排序也是分治思想的一种典型应用。
2.算法步骤
分区操作 Partition
3.实现
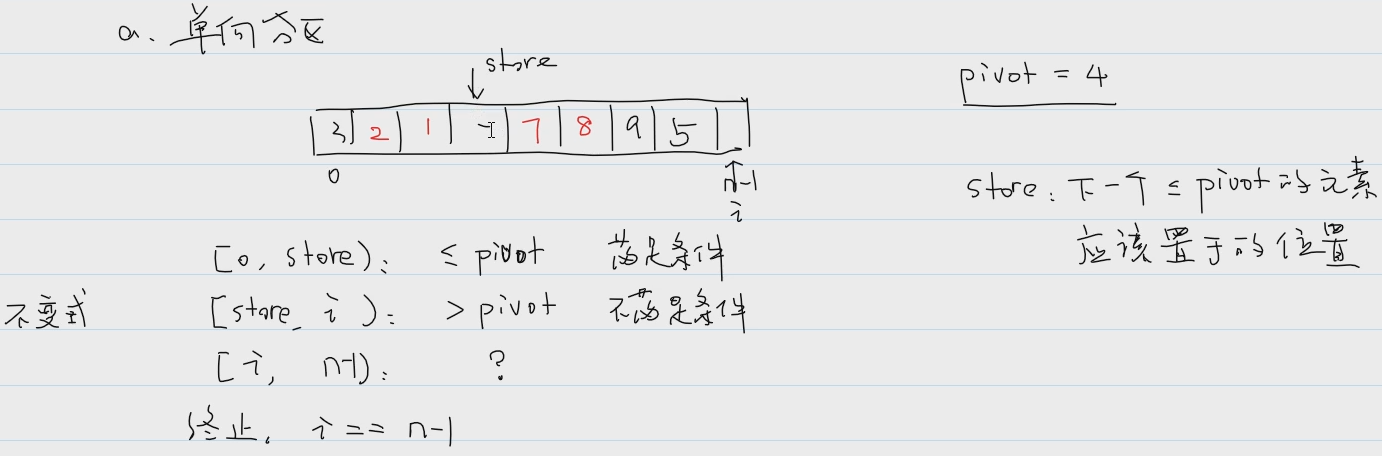
(1)如何分区
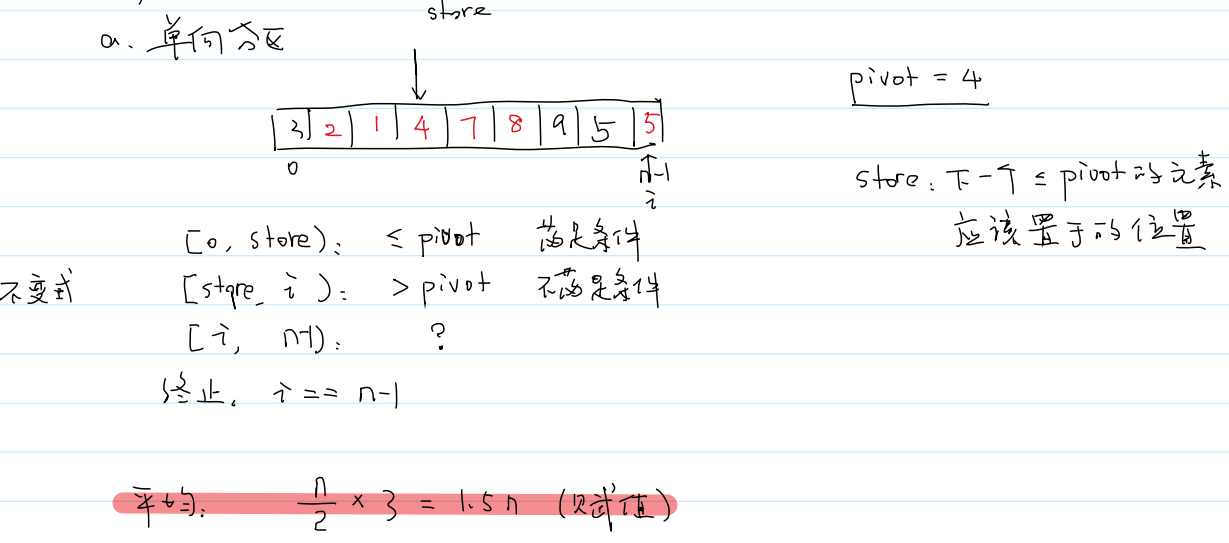
①单向分区
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <time.h>#define SIZE(a) (sizeof(a)/sizeof(a[0]))
#define SWAP(arr, i, j){ \int t = arr[i]; \arr[i] = arr[j]; \arr[j] = t; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//花生讲义的单向分区(单向扫描算法)
int partition(int arr[], int left, int right) {// 选取基准值,并将基准值放到最右边int idx = rand() % (right - left + 1) + left;int pivot = arr[idx];SWAP(arr, idx, right);// 分区操作int storeIdx = left;for (int i = left; i < right; i++) {if (arr[i] < pivot) {SWAP(arr, storeIdx, i);storeIdx++;}}SWAP(arr, storeIdx, right);// 返回基准值最终所在的索引return storeIdx;
}void quick_sort_helper(int arr[], int left, int right) {// 边界条件if (left >= right) return;// 递归公式int idx = partition(arr, left, right);quick_sort_helper(arr, left, idx - 1);quick_sort_helper(arr, idx + 1, right);
}void quick_sort(int arr[], int n) {srand(time(NULL));quick_sort_helper(arr, 0, n - 1);
}int main(void) {int arr[] = { 5,4,3,2,1 };quick_sort(arr, 5);print_array(arr, 5);return 0;
}
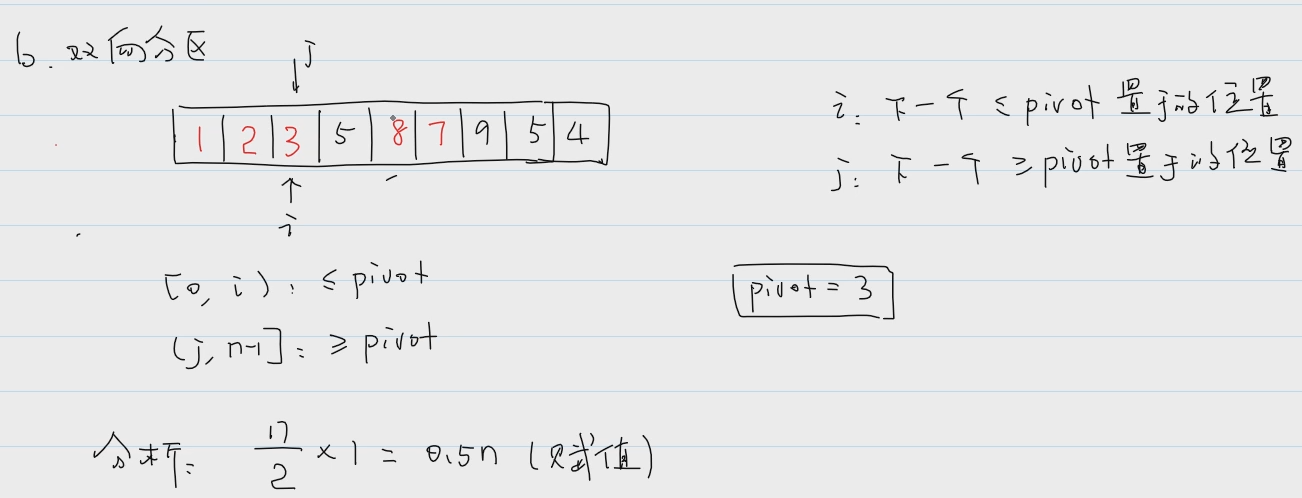
②双向分区:
考研,划分左右区间。性能最好。
左右两根指针,向中间移动,相遇点即为pivot的位置
//双向分区(双向扫描)
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#define SIZE(a) (sizeof(a)/sizeof(a[0]))void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}int Partition(int arr[], int left, int right) {//选取基准值int pivot = arr[left];//双向分区int i = left, j = right;while (i < j) {//先移动j,找<pivot的元素while (i < j && arr[j] >= pivot) {j--;} // i == j || arr[j] < pivotarr[i] = arr[j];//再移动i,找>pivot的元素while (i < j && arr[i] <= pivot) {i++;} // i == j || arr[i] > pivotarr[j] = arr[i];} // i == jarr[i] = pivot;return i;
}void QuickSort(int arr[], int left, int right) {//边界条件if (left >= right) return;//递归公式int idx = Partition(arr, left, right);print_array(arr, 5);QuickSort(arr, left, idx-1);QuickSort(arr, idx+1, right);
}void quick_sort(int arr[], int n) {//委托的原因:(1)数组不好递归,区间好递归//(2)丑陋的内部设计要封装起来,只暴露一个简单易用的接口给用户QuickSort(arr, 0, n - 1);
}int main(void) {int arr[] = { 5,4,3,2,1 };quick_sort(arr, SIZE(arr));return 0;
}
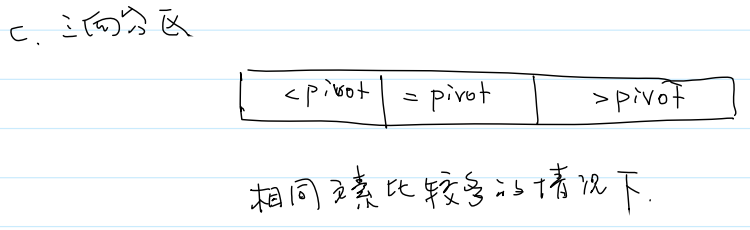
③三向分区:
应用场景:相同元素比较多的情况下
一般情况下三向分区性能弱于单向分区和双向分区,但在相同元素较多时三向分区算法性能较高。
极端情况,当数组元素全部相同时,三向分区算法一次就能结束。
4.性能分析
(1)时间复杂度:
①最好情况:
每次分区,基准值恰好位于中间,每次分区都可以分为大小相等的两份
T(n) = O(n) + T( n 2 \frac{n}{2} 2n) + T( n 2 \frac{n}{2} 2n) = 2T( n 2 \frac{n}{2} 2n)+O(n) = O(nlogn)
②最坏情况:
每次分区,基准值都位于两端
T(n) = O(n) + T(n-1) = cn + T(n-1) = cn + c(n-1) + T(n-2) = c[n+ n-1 + n-2 + … + 1] = c n ⋅ ( n − 1 ) 2 c\frac{n·(n-1)}{2} c2n⋅(n−1)= O(n²)
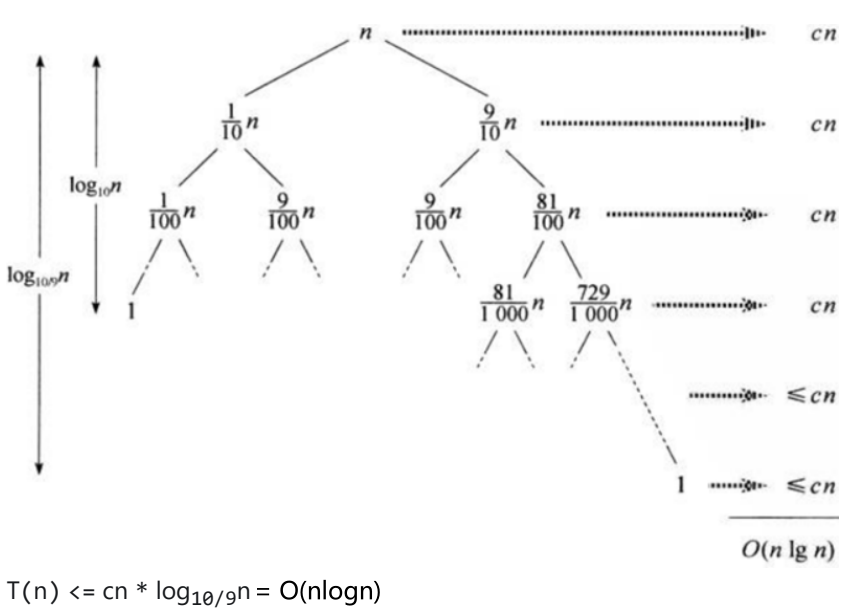
③平均情况:
假设每次分区,都划分成9:1的区间
(2)空间复杂度:O(logn)
平均情况下,栈的深度为 O(logn)。
大O表示法,是表示增长趋势,并不是实际大小。O(logn)的实际内存大小,并不一定会大于O(1),因为常数项可能很大。
(3)稳定性:不稳定
在分区操作中,选取基准值后,我们会将其和最右边的元素进行交换。这可能是一
次长距离的交换,因此快速排序是不稳定的。
5.快排的优化 (改进策略):
(1)选取合适的基准值:
①随机选取
②选取3到5个元素,选取其中位数
(2)当子区间长度小于等于某个值(≤32,≤64)时,改用插入排序
(3)分区算法:
当区间中相同元素较多时,改用三向分区

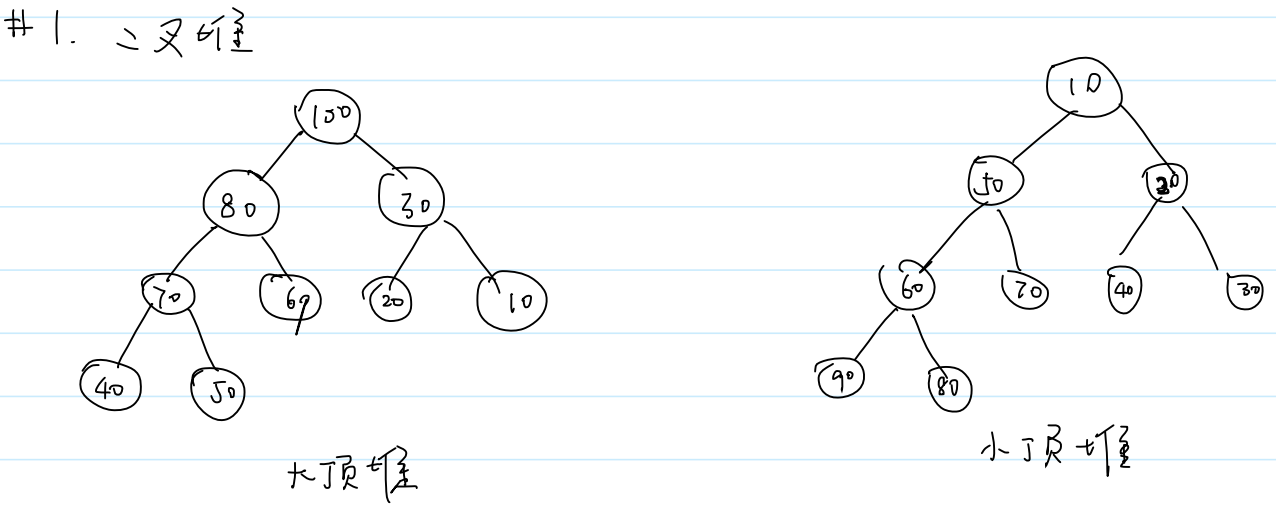
9.堆排序
1.二叉堆
(1)大顶堆 (大根堆)
根结点是最大值,左右子树也是大顶堆
(2)小顶堆 (小根堆)
根结点是最小值,左右子树也是小顶堆
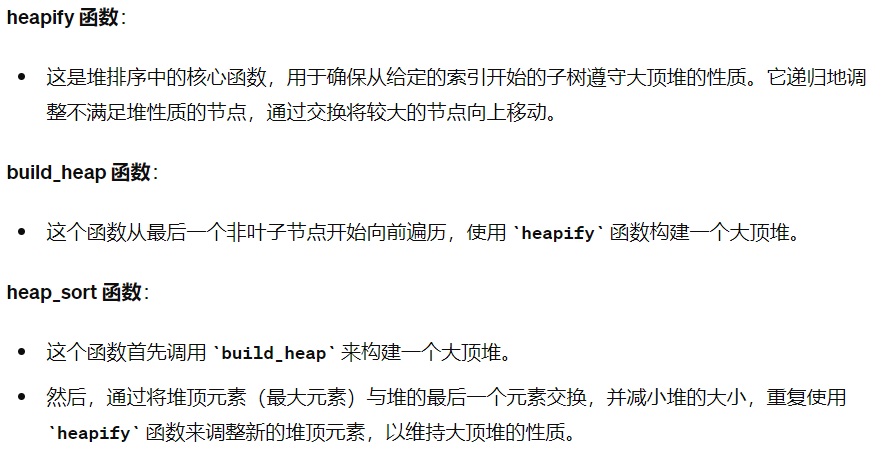
2.算法步骤
(1)构建大顶堆
(2)初始化无序区长度 len = n
(3)交换堆顶元素和无序区的最后一个元素,无序区的长度len–。
(4)重新调整成大顶堆,即根结点下坠。重复,直至len == 1。
3.实现:大顶堆
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>#define SWAP(arr, i ,j){ \int temp = arr[i]; \arr[i] = arr[j]; \arr[j] = temp; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//i:需要调整的结点索引
//n:索引的最大范围
void heapify(int arr[], int i, int n) {while (i < n) {//求三个元素的最大值int lchild = 2 * i + 1;int rchild = 2 * i + 2;int maxIdx = i;if (lchild < n && arr[lchild] > arr[maxIdx]) {maxIdx = lchild;}if (rchild < n && arr[rchild] > arr[maxIdx]) {maxIdx = rchild;}if (maxIdx == i) break; //如果最大值是根结点,调整提前结束 SWAP(arr, i, maxIdx); //如果不是,交换根结点和最大值结点i = maxIdx; //继续下坠} //i >= n || maxIdx == i
}void build_heap(int arr[], int n) {//找到第一个非叶子结点i: lchild(i) = 2i+1 < n,2i+1 <= n-1, 2i <= n-2, i <= n/2 - 1//从后往前依次构建大顶堆for (int i = n / 2 - 1; i >= 0; i--) {heapify(arr, i, n);}
}void heap_sort(int arr[], int n) {//1.构建大顶堆build_heap(arr, n);//2.初始化无序区的长度int len = n;//3.交换堆顶元素和无序区最后一个元素,直到 len == 1while (len > 1) {SWAP(arr, 0, len-1);len--;heapify(arr, 0, len);} //len == 1
}int main(void) {int arr[] = { 9, 8, 7, 6, 5, 4, 3, 2, 1, 0};heap_sort(arr, 10);print_array(arr, 10);return 0;
}
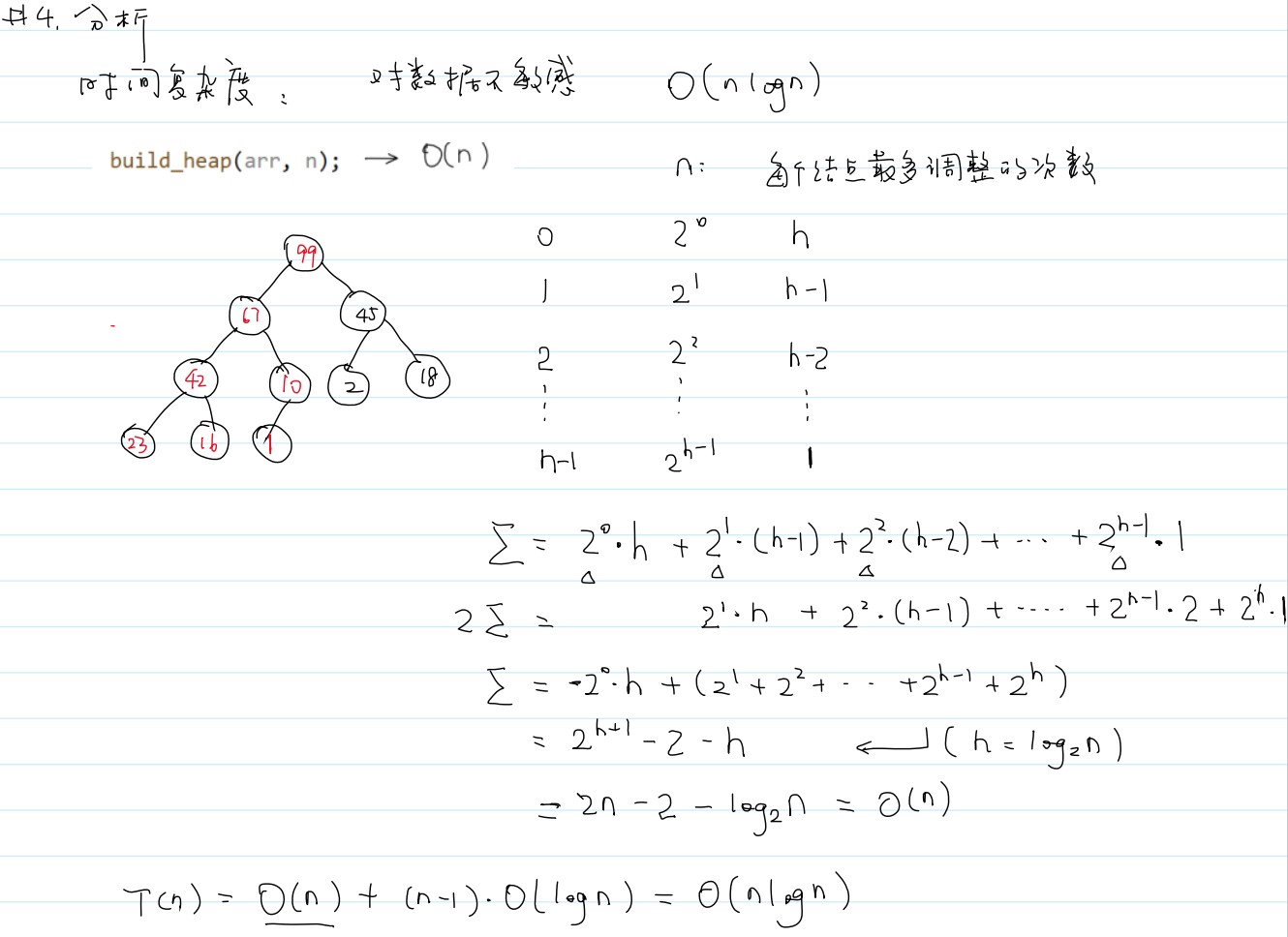
4.性能分析
(1)时间复杂度:堆排序对数据不敏感,任意情况下均为O(nlogn)
①构建大顶堆 build_heap():O(n)
②调整堆:(n-1) * logn = O(nlogn)
(2)空间复杂度:O(1)
【没有递归,也没有额外使用数组】
(3)稳定性:
不稳定。父结点与子结点交换,在数组里是远距离交换
归并排序 vs 堆排序:
共同点:都对数据不敏感,时间复杂度都是O(nlogn)
不同点:归并排序空间复杂度O(n),但稳定;堆排序空间复杂度O(1),但不稳定。
10.如何设计一个通用的排序算法
出租车很快,但有时候可能堵车
地铁比较稳定,就像堆排序对数据不敏感
洗牌算法:随机打乱数组
完整代码:
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <time.h>#define SIZE(a) (sizeof(a)/sizeof(a[0]))
#define SWAP(arr, i ,j){ \int temp = arr[i]; \arr[i] = arr[j]; \arr[j] = temp; \
}void print_array(int arr[], int n) {for (int i = 0; i < n; i++) {printf("%d ", arr[i]);}printf("\n");
}//洗牌,随机打乱 【Fisher-Yates洗牌算法】
void shuffle(int arr[], int n) {srand(time(NULL)); // 初始化随机数生成器for (int i = 0; i < n - 1; i++) {// [i, n-1]int j = rand() % (n - i) + i;SWAP(arr, i, j);}
}int main(void) {int arr[] = { 0,1,2,3,4,5,6,7,8,9 };shuffle(arr, SIZE(arr));print_array(arr, SIZE(arr));return 0;
}