设计师网名怎么取才艺术丽水网站seo
1 引言
自适应巡航控制( Adaptive Cruise Control,ACC) 是汽车驾驶辅助系统的重要组成部分,其作用是根据车距传感器探测到本车( ACC 车辆) 与主目标车辆( 前车) 之间的相对位置和相对速度信息,自动调节ACC 车辆的节气门开度或部分制动力矩( 即ACC 车辆的加速度) ,实时控制本车与前车之间的相对车距和相对速度,从而有效减轻驾驶员在驾驶过程中的操作负担,增大道路的交通流量,提高车辆行驶的主动安全性[1]。
由于汽车自适应巡航控制系统所处的行驶工况复杂,且存在较强的非线性和不确定性因素,因此目前针对此类问题大多数采用非线性系统等效线性化方法[2-4],建立线性参考模型并进行参数辨识和控制策略设计。这种等效线性方法在汽车中低速行驶时可以取得较好的控制精度,但随着汽车
行驶速度提高,离线或在线辨识的参考模型往往变得非常不准确,参数模型由于阵风干扰或轮胎磨损等时变因素影响不断发生摄动,鲁棒性和自适应性较差,无法保证控制品质稳定可靠[5]。
针对非线性系统等效线性化方法的不足,本文首先建立了汽车逆纵向动力学模型; 然后基于模糊控制理论设计自适应巡航控制器,使本车能够以一个安全车距准确跟踪前车行驶; 最后,利用Matlab /Simulink 验证了汽车自适应巡航控制系统在加速跟随和前车插入等复杂行驶工况下的跟踪性、安
全性和适应性。
2 ACC 系统总体设计
汽车自适应巡航控制系统的主要功能是辅助驾驶员控制车辆,减少驾驶员劳动强度,保证车辆安全行驶。汽车自适应巡航控制系统主要分为汽车自适应巡航控制器、汽车逆纵向动力学模型和汽车纵向动力学模型三部分。其中,控制器的主要作用是通过传感器采集到的本车和前车的信息确定本车期望加速度的大小。汽车逆纵向动力学模型将期望加速度转化为节气门开度和制动压力,并将其施加于汽车纵向动力学模型,以实现控制器的期望加速度命令,达到自适应巡航的功能。汽车自适应巡航控制系统总体设计如图1所示。

图1 汽车自适应巡航控制系统总体设计
3 车辆逆纵向动力学模型
汽车自适应巡航控制器得出的期望加速度a 需要通过汽车逆纵向动力学模型转化为期望的节气门开度α 和制动压力p,然后将它们输入到汽车纵向动力学模型中,以控制汽车的加速、减速和匀速运动,实现汽车的自适应巡航功能。汽车逆纵向动力学模型结构如图2 所示。
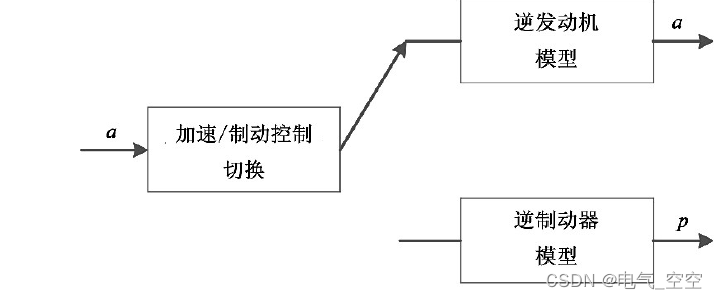
图2 汽车逆纵向动力学模型
3.1 加速控制
经逻辑切换后,如果切换后为加速控制,则需按照期望加速度的要求,经过计算得到期望发动机转矩,再通过发动机逆向模型查得期望的节气门开度。
3.2 制动控制
经过逻辑切换之后,如切换为制动控制,需按照期望加速度a,求得期望制动力Fx,继而通过制动器逆向模型求得制动压力p,将p 通过执行器施加于汽车纵向动力学模型进行制动。
4 汽车自适应巡航控制器的设计
由于汽车自适应巡航系统的复杂性、非线性和不确定性等因素,本文将采用模糊控制算法设计汽车自适应巡航控制器。
汽车自适应巡航控制器将传感器测得的两车的相对车距s0、前车车速vp和本车车速vc作为输入,经过模糊化、模糊推理和反模糊化得到汽车期望加速度a。汽车自适应巡航控制器设计原理图如图3 所示。
4.1 安全车距的计算
安全车距,作为ACC 系统的重要组成部分,决定了ACC系统车辆在行驶过程中的跟车间距,为ACC 系统的控制算法的设计提供了参考间距输入值。在ACC 系统中,安全车距控制策略根据行车环境决定期望的跟车间距,再利用控制算法通过控制相应的节气门开度和制动器的制动压力,实现车辆对期望车速和期望车间距的自适应调整。过小的安全车距容易引发交通事故,而过大的安全车距不仅损失了道路的交通通行能力,同时还容易导致邻近车道车辆的换道插入,从而影响ACC 系统车辆的跟车效率、降低ACC 系统的使用率。因此安全车距控制策略的好坏在于它是否能适应多变的行驶环境,并且有效的平衡行驶过程中的安全性、跟车性以及道路的通行能力等[6]。
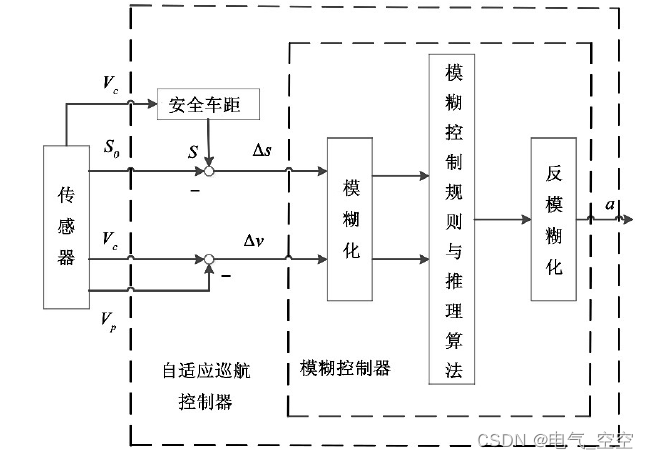
图3 汽车自适应巡航控制器设计原理图
4.2 模糊控制器的设计
模糊控制器首先将输入值从数字量转化为模糊量,即模糊化过程; 其次对模糊量由给定的规则进行模糊推理,即模糊推理过程; 最后把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量,即反模糊化过程。为了使本车能够在安全车距下准确地跟随前车,本文选取安全车距s 与相对车距s0的差值Δs 与相对速度Δv 作为控制器的输入量,以本车的加速度a 作为输出量,设计一个“双输入单输出”模糊控制器。
5 结论
1) 本文建立的汽车逆纵向动力学模型与实际车型的结构特点相一致,能够较真实地反映出车辆纵向动力学的非线性时变特性,可满足汽车自适应巡航控制系统对动力学传动系统模型的要求。
2) 从仿真结果来看,本车能够快速地加减速,保证汽车的安全; 并且在跟随前车时,能够以一定的安全车距精确稳定的跟随行驶。因此,基于模糊控制理论的汽车自适应巡航控制系统能够有效应汽车行驶过程中的各种情况,保证汽
车的良好的跟踪性、安全性和适应性。